









SIGMATEK은 TCS(Traffic control System)라는 이름으로 차량 제조업체 독립적인 fleet 관리시스템을 도입하고 있다. VDA 5050, MQTT, JSON, UDP 및 TC/IP와 같은 개방형 표준 프로토콜을 사용하여 어디서나 연결할 수 있는 AGV용 시스템이다. (사진제공: SIGMATEK)
내부 물류의 혁신: AGV및AMR용실시간소프트웨어 SlamLoc. SPS 2022에서SIGMATEK은 내부 물류 자동화를 위한 하드웨어에 독립적인 소프트웨어 제품을 소개했다. TCS(교통 제어 시스템)는 브랜드에 관계없이 자율 이동 로봇(AMR)을 일반적인 무인 반송차 시스템에 통합하고 주변 IT 및 자동화 시스템에 연결할 수 있다. 실시간 내비게이션 소프트웨어 SlamLoc은 AMR이 윤곽 기반(contour-based) 내비게이션을 계속하는 동안 환경 변화를 처리하는 방법을 혁신했다. TCS와 SlamLoc 모두 유연성, 신뢰성 및 효율성 측면에서 AGV에 최고 점수를 준다. (by 페터 켐프트너 X-technik 2022년 10월호 발췌)
이른바 디지털화는 생산 시스템의 완전한 자동화를 통해서만 원하는 결과를 제공할 수 있다. 기계 자체 외에도 여기에는 전체 컨베이어 기술뿐만 아니라, 로봇 및 핸들링 장치도 포함된다.
내부 물류 자동화
유연한 제조 전략을 구현하는 데 있어 무인반송차(AGV)와 자율 이동 로봇(AMR)이 생산 프로세스를 보다 유연하게 만드는 핵심 역할을 수행한다. AGV 및 AMR은 변경된 요구 사항, 프로세스 및 운송 경로에 매우 쉽게 적응할 수 있기 때문에, 과거에 일반적이던 정적인 장치들을 점차 대체하고 있다. 이러한 방식으로 자체적으로 최적화된 인더스트리 4.0의 생산 기반 중 하나를 형성한다. 사용 가능한 제품의 범위는 단일 차량을 완전히 자율적으로 탐색하는 것부터 폐쇄형 시스템에 까지 이른다. SIGMATEK은 여러 AGV 및 AMR을 염두에 두고 있었다. 제조업체 고객들 중 그들은 차량의 보드 제어, 안전 및 구동 기술에 주로 혁신적인 자동화 시스템을 제공하는 오스트리아 공급업체의 제품을 사용한다. 무엇보다도 그들은 매우 작은 크기, 높은 에너지 효율성 및 타협하지 않는 산업적 적합성의 조합을 높이 평가한다. 차량은 대부분 제조업체의 독점 소프트웨어 시스템을 사용하거나 개별 프로그래밍을 통해 제어된다.
SIGMATEK SlamLoc은 64비트 산업용PC에서 작동하도록 최적화되어 있으며 WLAN 연결이 포함되어 있는 하드웨어를 포함하여 번들로 SIGMATEK에서 제공하고 있다.
차량 독립성으로 목적지에 도달
SPS 2022에서 SIGMATEK은 내부 물류 자동화를 위한 하드웨어 독립적인 소프트웨어 제품을 소개했다. 그 중 하나는 차량과 마스터 간의 통신을 위해 표준화된 VDA 5050 인터페이스를 사용하는 개방형 AGV fleet 관리 시스템 TCS(Traffic Control System)이다.
따라서 TCS는 브랜드에 관계없이 자율 주행 로봇(AMR) 및 AGV를 일반적인 무인 운송 시스템에 통합하고 주변 IT 및 자동화 시스템에 연결할 수 있다. 제조업체 독립적인 마스터 컨트롤에 대한 자세한 정보는 이미 연재된 무인화기술 2022년 6월호에서 볼 수 있다.
항해의 한계에서 자유
AGV(Automated Guided Vehicle)는 온보드 내비게이션 작업을 수행한다. 따라서 그들은 대부분Fleet 관리 시스템의 운송 명령에서 파생되는 정의된 경로를 따른다. 차량은 다양한 내비게이션 방법을 사용하여 지속적으로 경로를 확인한다.
따라서 인공 랜드마크 없이 작동할 수 있는 윤곽 기반 레이저 내비게이션이 점점 더 많이 구현되고 있다. 또한 다양한 높이에 장착할 수 있고 차량의 안전에 필요한 2D 레이저 스캐너를 사용하여 주변을 스캔하고 익숙한 윤곽을 사용하여 자신의 위치를 결정한다. 이상적으로는 정적 기능을 감지할 수 있도록 스캐너가 장착된다.
그러나 배송 및 수령구역과 같은 생산 및 저장 공간은 윤곽이 고정된 정적인 풍경이 아니다. 홀 계획이 부정확하거나 불완전한 경우가 많다. 꽉 찬 선반이나 팔레트는 그 뒤에 있는 벽의 시야를 종종 차단하는 추가적인 장애물이다. 운송 박스가 이전과 다르게 배치된다면 등고선 기반 내비게이션은 한계에 도달한다.
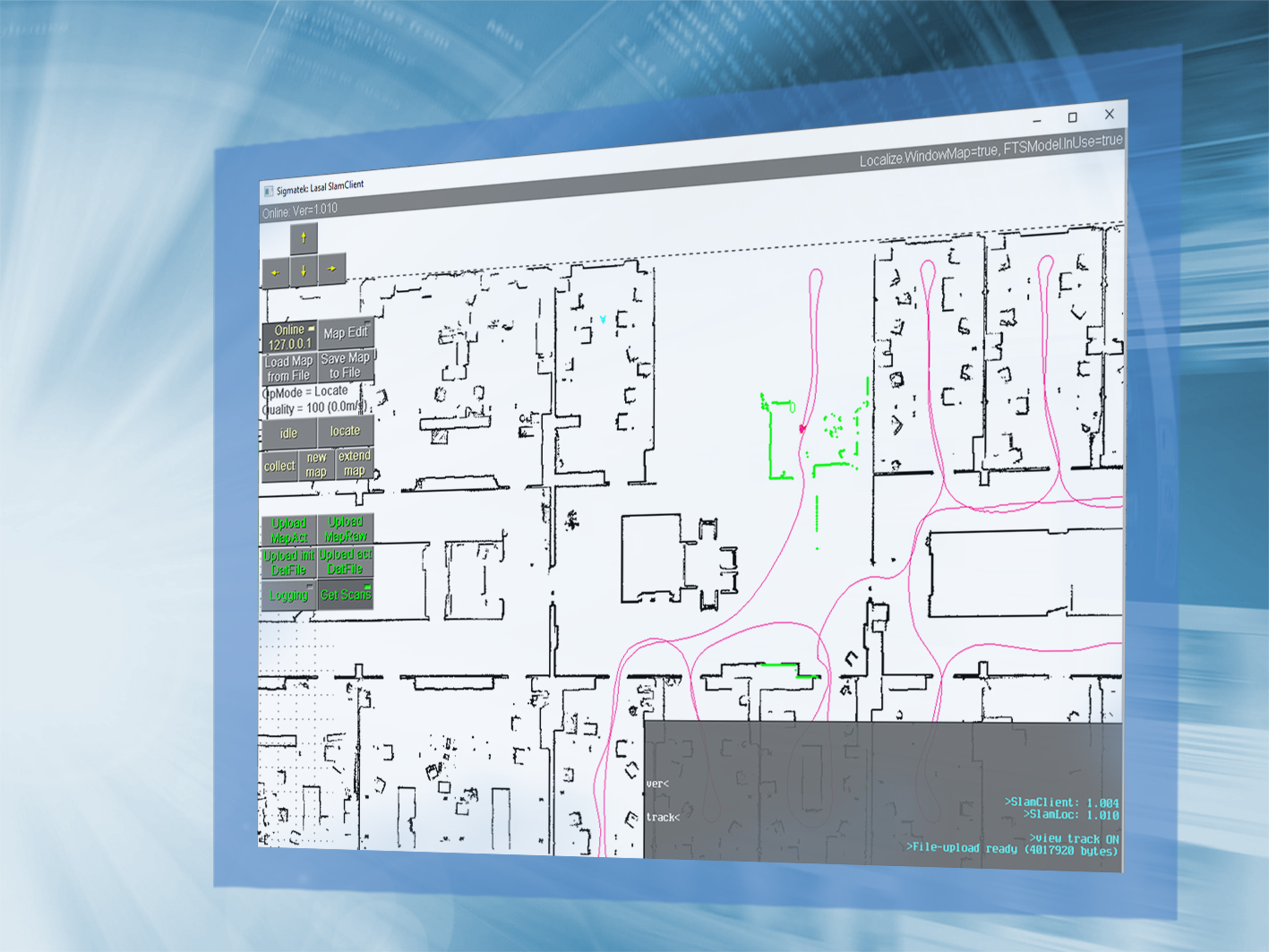
SIGMATEK Slamclient는 초기에 사용된다. 시작, 시뮬레이션 그리고 시각화 내비게이션뿐만 아니라, 관리 및 지도를 처리한다.
현실에 대한 지속적인 적응
SLAM(simultaneous localization and mapping) 내비게이션 방식이 해결책이 될 수 있다. 이 과정에서 AMR은 동적으로 지도를 탐색하고 생성하는 동안 주변 기능을 기록한다. “따라서 계란이 먼저냐 닭이 먼저냐라는 문제가 발생한다. 지도를 만들려면 차량을 완벽하게 현지화해야 한다. 현지화를 위해서는 지도가 필요하다.”라고 SIGMATEK의 이미지 처리 시스템 팀 리더인 Otto Koller는 설명한다. “그러므로 두 프로세스가 동시에, 즉 동시다발적으로 인터페이스되어 발생해야 한다.
혁신적인 AMR내비게이션
물론 SLAM을 사용하여 내비게이션 하는 자율주행차량은 이미 있다. 주제는 수학적으로나 소프트웨어적으로나 모든 AMR 제조업체가 도달할 수 있는 것은 아닌 거대한 도전 과제다. 이러한 이유로 기존 솔루션의 구현 품질에는 상당한 차이가 있다.
TCS와 마찬가지로 SIGMATEK은 사용되는 제어 기술에 관계없이 제조업체가 AMR에 쉽게 통합할 수 있는 개방형 SLAM 솔루션이 필요하다고 인식했다. 야심 찬 목표는 단 몇 분 만에 작동하고 사전 설치된 계획이 필요하지 않으며 급격한 윤곽 변화가 있어도 실시간으로 ±10mm 및 ±1°의 정확한 위치를 결정하는 시스템을 만드는 것이었다. 동시에 소프트웨어는 하드웨어 리소스 요구 사항이 낮아야 한다. 결국 SLAM 내비게이션이 실행되는 박스형 PC는 너무 많은 공간이나 전력을 사용할 수 없다.
정확한 결정 차량 위치
SIGMATEK SlamLoc 실시간 현지화 소프트웨어는 윤곽 기반 탐색을 사용하여 AMR이 환경 변화를 처리하는 방법을 혁신적으로 처리한다. SlamLoc은 초기 교육 주기 동안 경로 계획의 기반으로 환경 지도를 만든다. 이동 중 ‘이물질’이 감지되면 이를 고려하여 위치를 결정하는 데 사용된다. 따라서 위치 포즈, 즉 X/Y 좌표와 차량이 향하는 방향은 드라이브 데이터를 사용하여 단순히 외삽하는 것보다 훨씬 더 정확하게 결정할 수 있다.
“이것은 예상치 못한 장애물 앞에서 멈추는 것과는 아무런 관련이 없다. 이는 차량 또는 마스터 컨트롤이 개입할 필요 없이 차량의 안전 시스템에 의해 처리됩니다”라고 Otto Koller는 설명한다. 마찬가지로 새로운 물체를 피하거나 주변을 주행하는 것은 SlamLoc이 수행하는 것이아니라 TCS 및 차량의 온보드 제어 시스템과 같은 적절한 유도 제어 시스템이 수행합니다.” 그러나 SLAM 데이터를 기반으로 AMR은 즉시 반응하고 새로운 조건을 사용하여 가능한 최상의 경로를 결정할 수 있다. 이러한 방식으로 SlamLoc은 제어 시스템과 차량에 장애물을 피하거나 대체 경로를 선택할 수 있는 기능을 제공한다.

“SIGMATEK SlamLoc을 사용하면 무인반송차량이 통과할 때마다 선반과 팔레트의 가변 위치를 동적으로 다시 감지할 수 있다. 따라서 이제 처음으로 완충 구역, SlamLoc으로 상품 수령 또는 배송을 AGV 시스템에 통합할 수 있다.” Otto Koller, SIGMATEK GmbH & Co KG의 이미지 처리시스템 책임자
AMR용 손전등
“SlamLoc은 예를 들어 전체 선반이나 팔레트로 인해 윤곽이 보이지 않는 경우에도 모바일 로봇이 타협하지 않고 정밀한 윤곽 기반 탐색을 가능하게 합니다.”라고 2년 간의 개발 프로젝트를 이끈 Otto Koller는 설명한다. “이것은 지도와 나침반만으로는 제공할 수 없는 세부 사항을 야간 등산객에게 보여 주는 손전등과 같습니다.”
들보에 있는 나무와 덤불을 비추는 플래시 빛처럼 임시, 잠재적으로 움직일 수 있는 물체는 접근하면 천천히 시야에 들어오고 지나간 후에도 천천히 사라진다. 일반적으로 정적 카드에 추가되지 않는다. Otto Koller는 “시간이 지남에 따라 오류가 누적되어 현지화를 혼동할 수 있으므로 위험할 수 있습니다.”라고 설명한다. “주요 영구적인 변경이 있는 경우 영향을 받는 영역에서 새로운 교육 순서가 권장됩니다.”
변수에 대한 완전한 자유로운 환경 또한 승인된 사용자는 차량에서 생성된 지도의 개별 섹션을 편집하고 기능을 수동으로 제거할 수 있다. 이러한 방식으로 벽이나 경사로와 같은 것을 평면도에서 고정된 점으로 남겨두어 완전히 가변적인 영역을 생성할 수 있다. 그러면 차량이 지나갈 때마다 동적으로 선반과 팔레트의 가변 위치를 새롭게 감지한다. 친숙한 윤곽선의 사용을 의도적으로 피함으로써 이제 처음으로 완충 구역, SlamLoc을 통한 상품 수령 또는 배송을 자동 가이드 차량 시스템에 통합할 수 있다. Otto Koller는 “결과 정보를 실시간으로 주변 환경의 유효한 이미지로 기록하고 처리하는 것은 제가 SIGMATEK에서 30년 동안 일한 경력 중 가장 큰 도전 중 하나입니다. 전문적으로나 개인적으로 매우 다양한 팀의 협력 덕분에 가능했습니다.”라고 말한다.
빠르고 가벼우며 산업에 적합 SlamLoc은 다시 시작할 때 복잡한 초기화가 필요하지 않도록 설계되었다. 차량은 전원을 켜자마자 위치와 방향을 결정하기 시작한다. 소프트웨어의 가벼운 구조는 빠른 시작에도 도움이 된다. 이는 차량에 직접 설치되며, 데이터 뱅크 시스템 또는 라이브러리를 초기화하는 데 시간이 많이 소요될 필요가 없다. 데이터는 TCP/IP를 통해 주변 시스템과 교환된다. SlamLoc은 순수한 소프트웨어 솔루션으로 제공되거나 차량용으로 적합한 견고한 산업용 박스 PC에 사전 설치된다. 이것은 WLAN을 통해 TCS와 같은 Fleet 관리 시스템과 통신한다. 선택 사양인 ‘SlamClient’를 사용하면 실제 차량 움직임과 동적 매핑, 편집을 시각화할 수 있다. <기사제공: 서보스타>