








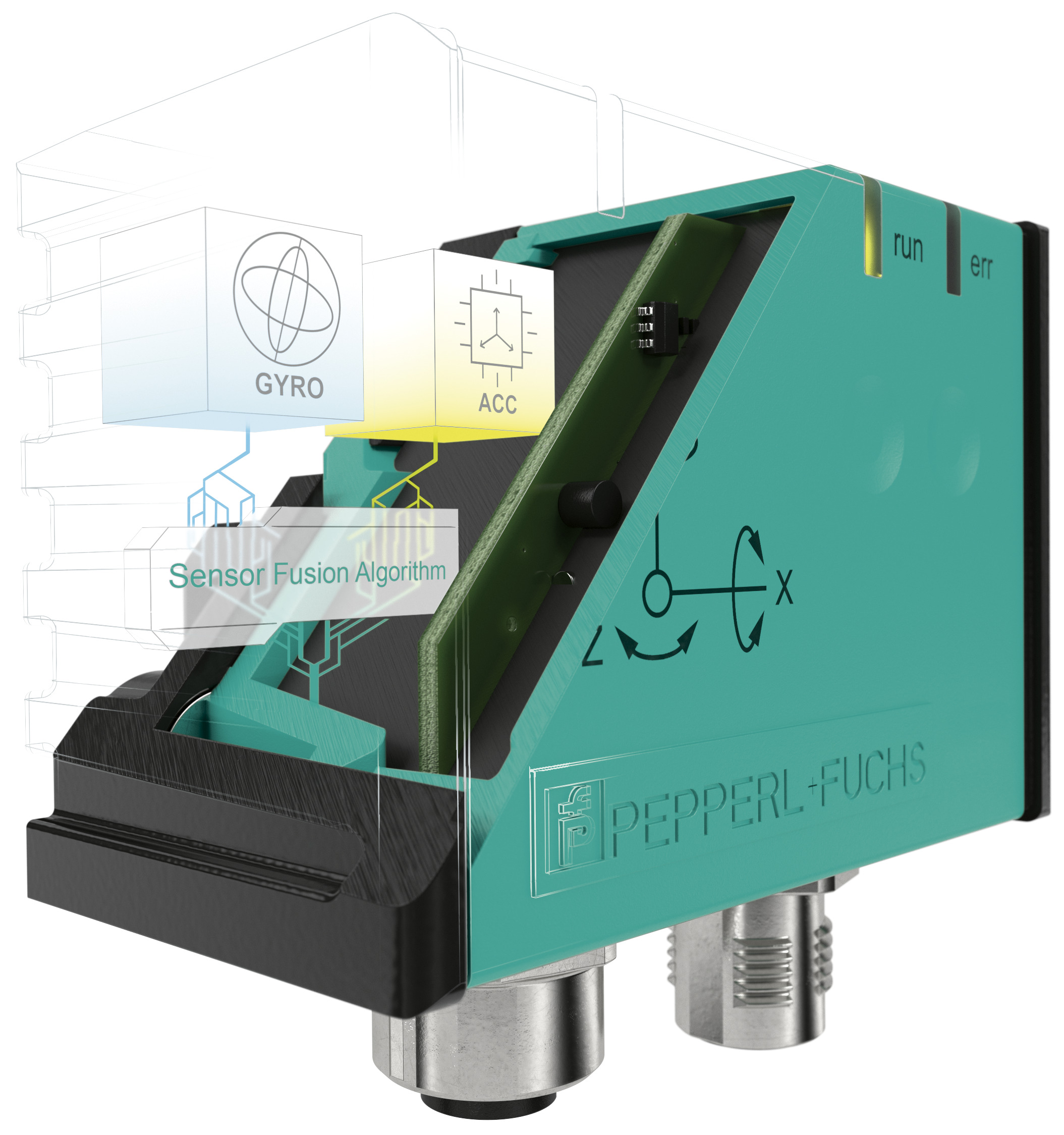
IMU F99 기울기 센서, 각도 출력과 동시에 3개 축에 대한 각각의 회전속도 및 가속도 제공
<캡션>
장비가 자갈길이나 움푹 패인 포트홀(Pothole)을 이동하거나 가속 및 제동을 하는 동안 휠 로더(Wheel Loader)의 버킷을 수평으로 유지하려고 시도한 적이 있는가? 이 경우에는 기포수준기의 기포관이나 정적 기울기 센서라 하더라도 의미 있는 값을 제공할 수 없다! 페펄앤푹스(Pepperl+Fuchs)의 새로운 IMU F99 기울기 센서는 외부 간섭(예, 포트홀)을 즉시 필터링할 수 있기 때문에 이와 같은 동적 애플리케이션에 신뢰할 수 있는 기울기 값을 제공한다. 또한 장비의 구동 동작이 크게 다른 경우에도 CAN 버스를 통한 독보적인 소프트웨어 조정 기능으로 뛰어난 각도 품질을 보장한다.
J1939가 있는 IMU F99
정적 기울기 센서는 풍력 터빈 및 AGV를 비롯해 건설, 농업, 임업 등에 사용되는 장비와 같이 동적으로 움직이는 장비에 적용할 경우 한계에 도달하기 쉽다. 정적 기울기 센서는 항상 동일한 축에 있는 중력 가속도를 기반으로 각도 변화를 감지하기 때문이다. 예를 들어, 브레이크를 밟거나 포트홀을 지나 이동하는 등의 추가 가속이 발생하면, 상당한 간섭을 유발하여 각도 측정을 불가능하게 만든다.
IMU F99 동적 기울기 센서는 이러한 유형의 애플리케이션을 위해 특별히 개발되었다. 이 센서의 핵심은 회전속도와 가속도를 3가지 공간 방향으로 모두 측정한 다음, 지능형 알고리즘으로 병합하여 각도 값을 생성한다. 이를 통해 안정적인 각도 출력을 얻을 수 있다. 하지만 장비들은 다양한 유형의 움직임을 가지고 있기 때문에, 회전속도와 가속도를 특정 장비에 따라 조정된 방식으로 병합해야 한다. 이를 위해 페펄앤푹스는 하나의 장치를 사용하여 휠 로더와 불도저, 크레인 등에서 위치측정을 수행할 수 있는 사용이 편리한 독보적인 조정 설정 기능을 제공한다.

휠 로더의 페이로드를 결정하는데 사용되는 IMU F99
또한 IMU F99는 각도 출력과 동시에 3개 축에 대한 각각의 회전속도 및 가속도를 제공하기 때문에 광범위한 어플리케이션에 사용이 가능하다. 예를 들어, 이 장치는 풍력 터빈의 회전속도를 결정하는데 사용할 수 있다. 이와 함께 블레이드에 원치 않는 얼음이 형성되어 변동될 수 있는 블레이드의 가속도를 모니터링할 수 있다. 이러한 방식으로 풍력 터빈의 회전속도를 제어하고, 예측유지보수를 수행할 수 있다.