









Geek+는 Intel과 협력하여 Vision Only Robot Solution을 선보였다. 출처: Geek+
긱플러스테크놀로지(Geekplus Technology Co.)가 비전전용로봇 을 출시했다. 이 시스템에는 인텔비주얼내비게이션모듈 이 포함되어 있으며, Geek+는 이 모듈이 물류 산업의 디지털 혁신을 주도할 것이라고 말했다.
긱+(Geek+)의 제품 담당 부사장인 솔로몬 리(Solomon Lee)는 “인텔과 공동으로 개발한 비전 전용 로봇 솔루션은 인텔 RealSense 카메라의 깊이 비전 인식을 효과적으로 활용한다. 양측의 심층적인 알고리즘 혁신과 함께 고객의 비즈니스 성장과 효율성을 높이고 스마트 물류의 디지털 및 지능형 업그레이드를 주도한다”고 말했다.
긱(Geek+)은 자사의 새로운 시스템이 인텔사를 이용한 세계 최초의 비전 전용 자율 이동 로봇(AMR)이라고 주장했다. s 비주얼 내비게이션 모듈. 또한 V-SLAM(Visual Simultaneous Localization and Mapping, 시각적 동시 위치 파악 및 매핑) 포지셔닝, 복합 감지 네트워크, 로봇 추종(robot following) 분야의 알고리즘 혁신도 특징으로 한다고 파트너들은 밝혔다. 이를 통해 매우 정확한 탐색과 장애물 회피가 가능하여 기업이 다양하고 복잡한 물류 시나리오에 대처하는 동시에 효율성과 정확성을 모두 향상시킬 수 있다고 Geek+는 말했다.
인텔 비주얼 내비게이션 모듈(Visual Navigation Module)을 탑재한 비전 전용 로봇은 이번 주 상하이에서 열리는 CeMAT에서 첫선을 보일 예정이다. 긱(Geek+)은 보다 스마트한 물류 시스템을 개발하기 위해 인텔과의 파트너십을 강화할 계획이라고 밝혔다.
2015년에 설립된 Geek+는 1,000명 이상의 고객이 창고 및 공급망 관리를 위해 AMR을 사용한다고 밝혔다. 이 회사는 미국, 독일, 영국, 일본, 한국, 중국 및 싱가포르에 지사를 두고 있다. 지난달에는 40,000 평방피트의 부지를 개장했다. 애틀랜타 인근 시설에서 12m(40피트) 높이의 자동 저장 시스템을 발표하고 Floatic과 파트너십을 맺었다.
로봇이 환경을 이해하는 데 도움이 되는 Intel RealSense
긱(Geek)+는 자사의 비전 온리 로봇 솔루션(Vision Only Robot Solution)이 인텔 리얼센스(RealSense) 카메라를 통합한다고 설명했다. 이 카메라는 모든 깊이 계산을 장치 내에서 직접 수행할 수 있는 올인원 설계로 되어 있다. 이를 통해 전력 소비가 줄어들고 특정 플랫폼이나 하드웨어로부터 독립할 수 있다고 회사는 말했다.
인텔 RealSense는 또한 다양한 비전 기반 AI를 지원한다고 인텔은 언급했다. 전용 비주얼 프로세서와 함께 사용하면 기계 학습 프로세스를 가속화하고 새로운 자동화를 위한 배포 주기를 단축할 수 있다.
인텔 리얼센스(RealSense) 카메라 덕분에, 긱+는 비전 온리 로봇(Vision Only Robot)이 주변 환경을 관찰하고, 이해하고, 학습할 수 있다고 말했다. 매우 정확하고 일관된 깊이 데이터를 얻음으로써 로봇은 주변 환경을 정확하게 인식하고 상호 작용할 수 있다고 회사는 말했다.
인텔 기업 전략 및 벤처 담당 부사장이자 인텔 기업 전략 사무소의 RealSense 사업부 총괄 매니저인 Mark Yahiro는 “MR이 환경 인식을 달성하는 데 매우 정확하고 일관된 깊이 비전 데이터는 매우 중요하며, 이는 포지셔닝, 내비게이션 및 장애물 회피 성능에 큰 영향을 미친다. 긱+(Geek+)와의 협력을 통해 뎁스 비전 데이터를 기반으로 한 AMR 혁신을 주도하고 있다”며 “물류 로봇이 복잡한 환경에서 매우 안정적이고 정확한 운송 서비스를 제공할 수 있도록 함으로써 민첩하고 지능적인 디지털 공급망을 강화하고 있다”고 말했다.
카메라 외에도 인텔 비주얼 내비게이션 모듈에는 인텔 코어 i7-1270P 프로세서 및 연결 모듈과 같은 구성 요소가 포함된 로봇 비전 허브가 포함되어 있다. 이 모듈은 또한 고속 네트워크를 통해 클라우드 엣지 협업을 가능하게 한다고 파트너는 말했다.
Geek+는 Vision Only Robots에 대한 알고리즘 지원
Geek+는 Vision Only Robot에서 실행되는 알고리즘에 대한 안정적인 계산 지원을 제공하기 위해 Intel Visual Navigation Module을 기반으로 하고 있다고 말했다.
V-SLAM 포지셔닝 알고리즘: 이는 다중 센서 데이터와 다양한 시각적 기능 요소를 융합하여 포인트 기능 맵, 라인 기능 맵, 개체 맵 및 특수 영역 맵과 같은 복합 맵을 생성한다. 복잡하고 역동적인 환경에서 안정적이고 정확한 포지셔닝을 제공할 수 있다고 회사 측은 밝혔다.
복합 탐지 네트워크: 기존의 물체 감지 네트워크와 검증 네트워크를 모두 사용하면 여러 차원의 감지 데이터를 처리하여 정확도를 높이고 오탐지율을 줄일 수 있다.
로봇 추종: 긱+는 인원 감지, 재식별, 시각적 표적 추적과 같은 모듈을 통합함으로써 유연하고 효율적인 시인식 파이프라인을 개발했다고 밝혔다. 대상 인원과 AMR 사이의 상대적 위치가 결정되면 Geek+가 자체 개발한 로봇 독립형 시스템인 RoboGo의 로컬 계획 알고리즘을 통해 목표 인원의 원활한 AMR 추적을 위해 자율 장애물 회피를 가능하게 한다.
긱(Geek)+는 인텔 비주얼 내비게이션 모듈(Intel Visual Navigation Module)의 깊이 인식과 협업 알고리즘 혁신의 조합이 비전 전용 로봇의 효율성을 보장할 것이라고 말했다. 또한 환경 인식, 포지셔닝 및 추적에 높은 정밀도와 효율성을 제공할 것이라고 회사는 말했다.
인텔과 긱(Geek+)은 공장 및 창고 운송과 같은 분야에서 이러한 로봇이 널리 채택될 것으로 기대한다고 밝혔다.
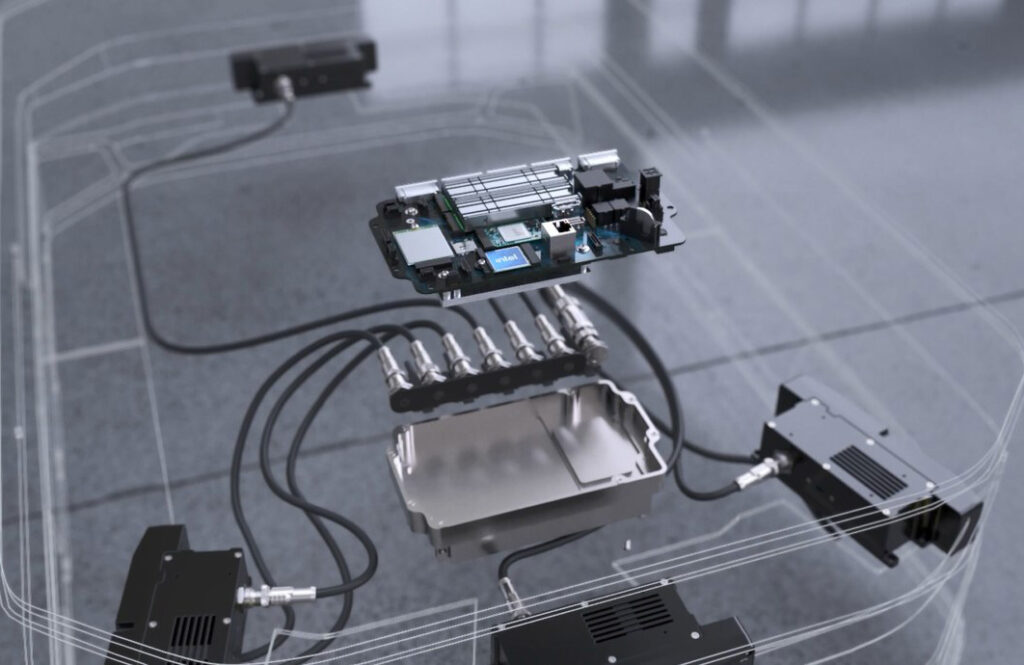
Intel RealSense와 Geek+ 기술을 결합한 로봇 비전 허브. 출처: Geek+