








행사장 전경. @ EtherCAT Technology Group, Office Korea
ETG(EtherCAT Technology Group) Office Korea가 1월 15일, 서울 포포인츠 바이 쉐라톤 서울 구로 호텔과, 16일 대전 호텔 ICC에서 ‘EtherCAT Roadshow Korea 2025 ( 이더캣로드쇼코리아2025 )’를 성황리에 개최했다.
자동화 업체, 기기 제조업체, 시스템 통합업체, 제품 관리자를 대상으로 개최된 EtherCAT Roadshow Korea 2025에서는 EtherCAT과 산업용 이더넷뿐만 아니라, EtherCAT의 기가비트 성능 및 사이버 보안과 같은 현재 트렌드에 대한 정보를 제공했다.
특히, 서울에서 열린 행사에는 Beckhoff Automation Korea, ADLINK Technology Korea, FASTECH, Movensys, PRESTO SOLUTION, Copley Controls, ICOP Technology가 스폰서로 참여하여, 다양한 어플리케이션 사례를 발표하고, 데모를 선보였다.
이번 로드쇼를 통해 ETG Office Korea는 지금까지 많은 회원사에서 EtherCAT을 도입해 성공적인 결과를 이루어냈으며, EtherCAT은 성장기회라는 메시지를 효과적으로 전달했다. 또, EtherCAT은 IP기반이 아니며, 위계질서가 분명한 아키텍처를 사용하고 있고, EtherCAT만의 다양한 특성으로 인해 해킹이 어려워서, 실제로 해킹이 이루어질 가능성이 매우 낮다는 점을 강조했다.
<취재 최교식 기자 cks@engnews.co.kr>
본격적인 행사에 앞서 ETG Office Korea의 유기석 대표는 환영사를 통해, EtherCAT은 자동화 분야에서 성능과 효율성을 인정받고 있는 고속 산업용 이더넷 기술이며, EtherCAT은 단순히 빠른 통신속도를 자랑하는데 그치지 않고, 실시간 성능과 확장성, 뛰어난 신뢰성 덕분에 다양한 산업분야에서 널리 사용되고 있다고 말했다. 이와 함께 오늘 이 기술이 어떻게 현장에 적용될 수 있는지, 어떻게 비즈니스에 실질적인 가치를 더해줄 수 있는지, 고객이 직면한 도전과제를 해결하는데 어떻게 EtherCAT이 도움을 줄 수 있는지 구체적으로 보여줄 수 있는 기회를 갖게 되어 매우 기대가 크다고 덧붙였다.
Ⅰ. ETG 발표
1. 이더넷, TCP/IP, 그 외: 혜택과 한계 - ETG 본사 마틴 로스탄(Martin Rostan) 협회장

마틴 로스탄 협회장이 이더넷 TCP/IP 혜택과 한계를 주제로 발표를 하고 있다. @ EtherCAT Technology Group, Office Korea
첫 번째 발표자로 나선 ETG 본사 마틴 로스탄(Martin Rostan) 협회장은 이더넷을 왜 사용하는지, 이더넷의 특성에 대한 주제를 시작으로 발표를 풀어나갔다. 다음은 그의 발표 내용이다.
이더넷은 OS에 들어가 있는 기술로서 이미 잘 확립된 기술이고 문제가 없는 기술이다. 그러나 이더넷을 이해해야만 실시간 통신의 한계점을 알 수 있고, 또한 EtherCAT을 왜 사용하는지에 대해 얘기하기 위해서는 이더넷의 특성과 TCP/IP에 대한 이해가 필요하다.
우선 왜 이더넷을 사용하고 있을까?
왜냐 햐면 자동화 시장 외에 더 큰 시장의 혜택을 얻기 위해서다. OT 시장보다 IT 시장이 훨씬 크다. 따라서 이더넷에 대해 누군가 개발비를 댄다면 우리는 그 혜택을 그대로 사용할 수 있기 때문이다. 이 기술은 자동화쪽에 그대로 적용하고 있는데 다른 업계에서 개발한 것이다.
이더넷 외에 CAN의 경우에는 자동차산업에서 개발한 것을 우리가 활용하고 있다. 현재 매년 10억 개 이상의 CAN 칩이 판매되고 있고, 따라서 CAN의 가격이 내려가고 있다. 이로 인해 자동화 시장에서도 사용하고 있는 것이다. CAN은 이제 더 이상 충분히 속도가 높지 않다. 그렇기 때문에 EtherCAT을 사용하고 있다. 또한 PC 기반의 컨트롤의 경우에도 자동화 산업에서 개발비를 댄 것이 아니라, 칩 회사들이 IT 시장을 위해서 비용을 투자해서 개발을 한 것이다. 예를 들어 인텔 칩이 세대를 거듭하면서 발전할수록, 그것들을 우리가 개발비를 대지도 않고 저렴하게 사용할 수 있는 것과 같다.
이더넷은 TCP/IP가 아니라, 그 하단의 레이어라고 얘기한다. 데이터를 연결하는 레이어. 이것은 IEEE 802.3 표준에 나와 있는 내용이다. 이더넷과 TCP/IP는 레이어드 아키텍처를 사용하고 있다. 각 레이어 별로 그 아래에 있는 레이어의 인터페이스, 그리고 그 상단에 있는 인터페이스를 충족한다는 뜻이다. 다행히도 하나의 기술을 다른 기술로 대체를 하더라도 사용할 수 있다. 다른 레이어를 다 바꾸지 않고 하나의 레이어만 바꿔도 사용할 수 있다.
레이어드 아키텍처를 간소화해서 만들기란 쉽지 않다. 물리적 레이어드의 선택의 폭이 넓어지고 있다.
<그림1>은 이더넷 인터페이스의 전형적인 모습이다.
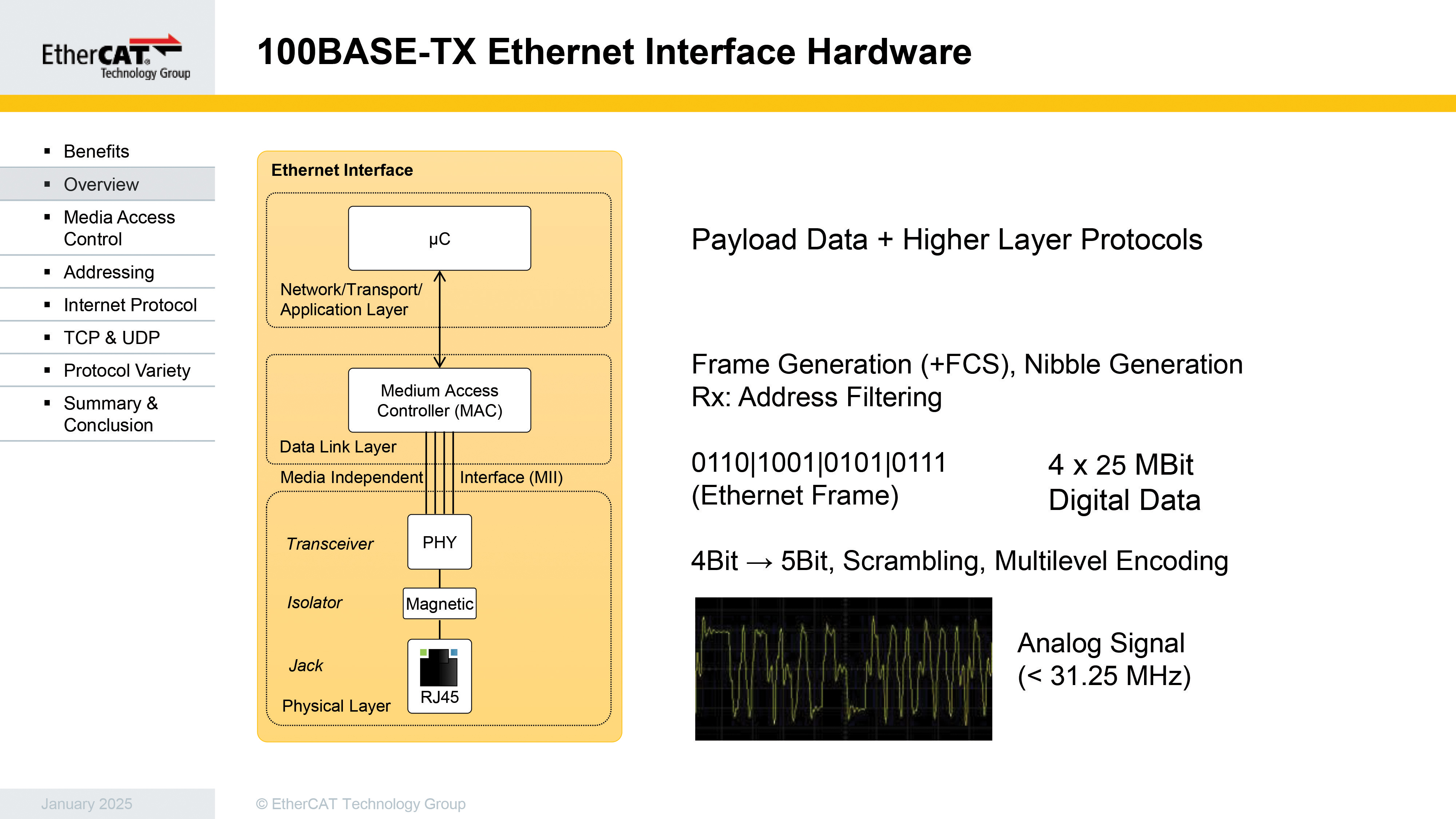
100BASE-TX Ethernet Interface Hardware. @EtherCAT Technology Group
이 레이어드 아키텍처 상단에 마이크로 컨트롤러가 있고, TCP 등이 들어간다. 그 다음으로는 미디움 엑세스 컨트롤러(MAC)가 들어간다. 이것으로 인해 이더넷 프레임이 가늘어진다. 여기에 있는 인터페이스는 주로 4비트를 사용하게 된다. 그래서 100메가비트를 4×25메가비트로 나누어서 사용하게 되고, PHY 같은 경우는 4 비트를 5비트로 전환을 하게 된다. 그리고 스크램블링(Scrambling)이 추가되고 멀티레벨 인코딩이 추가돼서, 31메가헤르츠의 아날로그 신호로 전환을 하게 된다. 케이블에는 31.25메가헤르츠의 아날로그 신호를 사용하게 된다.
그렇기 때문에 저렴한 케이블을 사용할 수 있다. 100메가비트를 사용하더라도 저렴한 케이블을 사용할 수 있는 이유다. 인코딩으로 인해서 비트를 메가헤르츠로 전환해주기 때문이다. 이것은 100메가헤르츠 대역폭에서도 볼 수가 있고, 기가비트도 마찬가지다. 1000같은 경우는 기가비트이고 이것을 메가헤르츠로 전환해서 사용하고 있다. 왜냐 하면 IT 세상 속에서는 데이터를 압축해서 대역폭을 낮추는 케이블로 사용하는데 많은 투자를 하고 있기 때문이다. 실리콘을 업데이트하는 것이 케이블을 바꾸는 것보다 훨씬 저렴한 방법이기 때문이다. 케이블은 저렴하게 사용하고 인코딩을 더 발전시키면 된다.
CAT.5와 CAT.6은 미국표준이다. IEEE 표준도 아니고, ISO나 IEC 표준은 아니다. 보통 CAT.5 케이블은 더 이상 사용하고 있지 않다. 보통 CAT.7을 새롭게 설치할 때 사용이 되고 있다. 물론 CAT.6와 CAT.7을 400메가헤르츠를 위해서 사용할 수도 있다. 케이블이 더 좋고 대역폭도 더 높다. 그렇게 되면 CAT.5 케이블을 주로 찾을 필요는 없다.
CSMA/CD는 이더넷이 원래 사용했던 미디어 액세스 컨트롤이다. CSMA/CD의 경우는 노드를 연결하는 방법으로서, CSMA/CD 네트워크의 30% 정도를 사용하면 스루풋이 0이 된다. 그렇기 때문에 대역폭의 일부만 사용할 수 있다. 그럼에도 불구하고 CSMA/CD를 왜 설명할까? 사실 충돌 윈도(Colision Window)가 중요하기 때문이다. 지연이 길면 길수록 최소한의 윈도도 더 커지는 것이 된다. 그렇기 때문에 리피터 룰을 사용하게 된다. 예를 들어 400미터의 케이블을 도입하게 되면 최소한의 윈도를 만들게 된다. 충돌 윈도를 설명한 이유는 이 프레임의 길이가 문제가 되기 때문이다. 최소한의 프레임 길이가 중요하다.
이러한 충돌 도메인(Collision Domain)은 허브로 이루어져 있다. 허브에서 모든 포트에게 빠르게 신호를 보낸다. 빠르지만 그렇게 똑똑하지는 않다. 그리고 말하면서 듣는 것을 동시에 할 수는 없다. 그런데 허브는 이제 스위치로 바뀌고 있고, 스위치는 허브에 비해서 3가지 장점을 가지고 있다.
첫 번째는 말하고 듣는 것을 동시에 할 수 있다는 것이다. 충돌 없이 두 가지를 동시에 할 수 있고, 스위치는 안에 큐(queue)와 버퍼가 있기 때문에, 스위치 내부의 충돌을 방지할 수 있다. 또한 스위치는 레이어 to 라우터 역할을 하기 때문에, 들어오는 트래픽을 듣고 프레임을 적절한 포트로 리라이팅을 해준다. 그래서 모든 포트로 동시에 내보내는 것이 아니다. 멀티캐스트나 브로드캐스트가 아닌 이상 적절한 포트로만 보내게 된다.
스의치의 단점도 있다. 스위치의 99%는 ‘Store and Forward’ 방식으로 운영이 된다. Store and Forward는 전체 프레임을 먼저 받고 프레임을 모두 확인해서 프레임이 건전성이 확인된 경우에만 다음으로 보내게 된다. 일부 스위치는 이 표준을 사용하지 않고 ‘Cut-Through’를 사용하기도 한다. ‘Cut-Through’의 경우에는 목표 주소를 받게 되면 바로 프레임을 보내게 된다. 그런데 IT 담당자들이 ‘Cut-Through’를 좋아하지 않기 때문에 ‘Cut-Through’는 표준화되어 있지 않고 대부분의 스위치는 ‘Store and Forward’ 방식으로 운영이 되고 있다.
Addressing: MAC-ID, Address, Host Name
가장 아래에 이더넷이 있고, 그 위에 IP가 있다. IP는 산업 프로토콜이 아니라, 인터넷 프로토콜을 말한다. IP 위에는 TCP가 있다. TCP는 포트를 사용하게 되고 그 위에 이름이 있을 수가 있다. 예를 들면 인터넷 혹은 프린터 같은 경우에는 각각 이름이 있을 수 있다(Host Name).
산업 자동화를 위한 수정되지 않은 이더넷? 처음에는 좋은 아이디어처럼 보이지만, 꽤 복잡해 보인다. 수정되지 않은 이더넷으로 실시간 성능을 달성하려면 많은 IT 노하우가 필요하고 까다로워 보인다.
2. 병목 현상 제거: 신속한 처리(removing the bottlenecks: processing on the fly) - ETG Office Krea 정명오 부장

ETG Office Krea 기술팀 정명오 부장이 ‘병목 현상 제거: 신속한 처리’를 주제로 발표를 하고 있다. @ EtherCAT Technology Group, Office Korea
이어서 정명오 부장이 네트워크의 병목현상을 제거해서 데이터 프로세싱을 신속하게 하는 방법에 대해 설명했다.
왜 EtherCAT이 빠르고 좋은 시스템인가?
산업현장에서는 많은 기능들과 제품들이 사용된다. 그 기능들이 독립적인 기능들을 하면서도 데이터를 공유하기 위해 버스시스템(Bus System)은 상당히 중요한 요소다. 버스시스템이 자동화에서는 가장 중요한 시스템이다.
버스시스템은 시스템 성능, 공급업체 및 구성 요소 선택, 제어 시스템의 전체 비용(특히 공급업체가 몇 개뿐인 경우), 중앙 제어를 선택할 수 있는지 여부를 정의한다.
이런 많은 선택사항 중에서 합리적으로 버스시스템을 선택하기 위해서는 알아야 할 것이 있다. 바로 시스템 내에서 데이터 흐름이 어떻게 이루어지고, 어디에서 병목현상이 생기는 지에 대해서 알아야 한다. 버스시스템 내에서 이러한 데이터 흐름을 만드는 것은 첫 번째로 Bus Cycle Time이다. 두 번째는 Reaction Time, 세 번째는 Control Cycle Time이다.
Control Cycle Time은 PC나 PLC 제어기 종류가 될 것 같고, Bus Cycle Time은 EtherCAT이나 이더넷, PROFINET 같은 제품들이 될 것이다. 그중에서 Control Cycle Time은 현시점에 볼 때 근 10년내에 1000배나 많은 데이터량을 처리할 수 있도록 빠르게 발전하고 있다. 제품들이 원하는 프로세싱을 즉시 처리할 수 있을 정도로 빠르게 처리하는 반면, 그러한 데이터들을 필드레벨에 와서 I/O 레벨까지 넘어오는 과정에서 병목현상으로 인해 지연이 되는 현상이 발생한다. 처리하는 요소들을 리얼타임에 맞게 처리하기 위해서는 버스시스템이 빨라야 한다.
이더넷은 가장 널리 사용되고 빠른 시스템 중 하나다. 따라서 EtherCAT 또한 이더넷을 베이스로 하고 있다. 하지만 이더넷을 베이스로 리얼타임 제어를 하기 위해서는 몇 가지 문제점이 있다.
첫 번째 퍼포먼스적인 문제다. 퍼포먼스적인 문제는 크게 세 가지로 볼 수 있는데, 대역폭 활용도, 스택 딜레이, 스위치 딜레이가 그것이다. 퍼포먼스 측면에서 뿐만아니라, 실제 적용하기 위한 효용성 측면에서도 가격, 호환성 문제, 동기화 문제가 있을 수 있다.
우선 대역폭 문제다. 이더넷을 베이스로 사용하기 위해서는 최소한의 프레임이 84바이트다. 단위시스템에서 디지털 인아웃을 32점을 사용한다고 하면 약 4바이트 정도가 사용이 되는데, 이 4바이트는 최소 프레임인 84바이트의 4.75%라는 작은 수치다. 이러한 수치는 이더넷이 아무리 빠르다 하더라도 지연이 증가하고 스루풋이 낮아지는 결과로 진행될 수 있다.
두 번째는 스택 딜레이 문제다. 네트워크에서는 많은 이유로 인해서 스택들이 사용이 되는데 네트워크에서 들어온 데이터들은 이러한 스택을 순차적으로 통과한 후에 프로세싱을 진행하게 된다. 그럴 경우 EtherNet/IP나 PROFINET의 경우에는 스택 사이즈가 1메가 정도가 되는데 우리가 일반적으로 사용하는 짧은 스몰 디바이스에 비해 1메가는 상당히 큰 수치다. 스택에서의 지연요소가 많이 발생할 수 있다(산업용 이더넷 프로토콜 스택은 크다. 프로세싱에는 시간이 필요하다).
이에 반해서 EtherCAT은 상당히 작은 스택을 가지고 있다. 일반적으로 EtherCAT의 전체기능을 활용함에도 불구하고, 약 70키로바이트의 스택 사이즈만으로도 전체기능을 활용할 수가 있다.
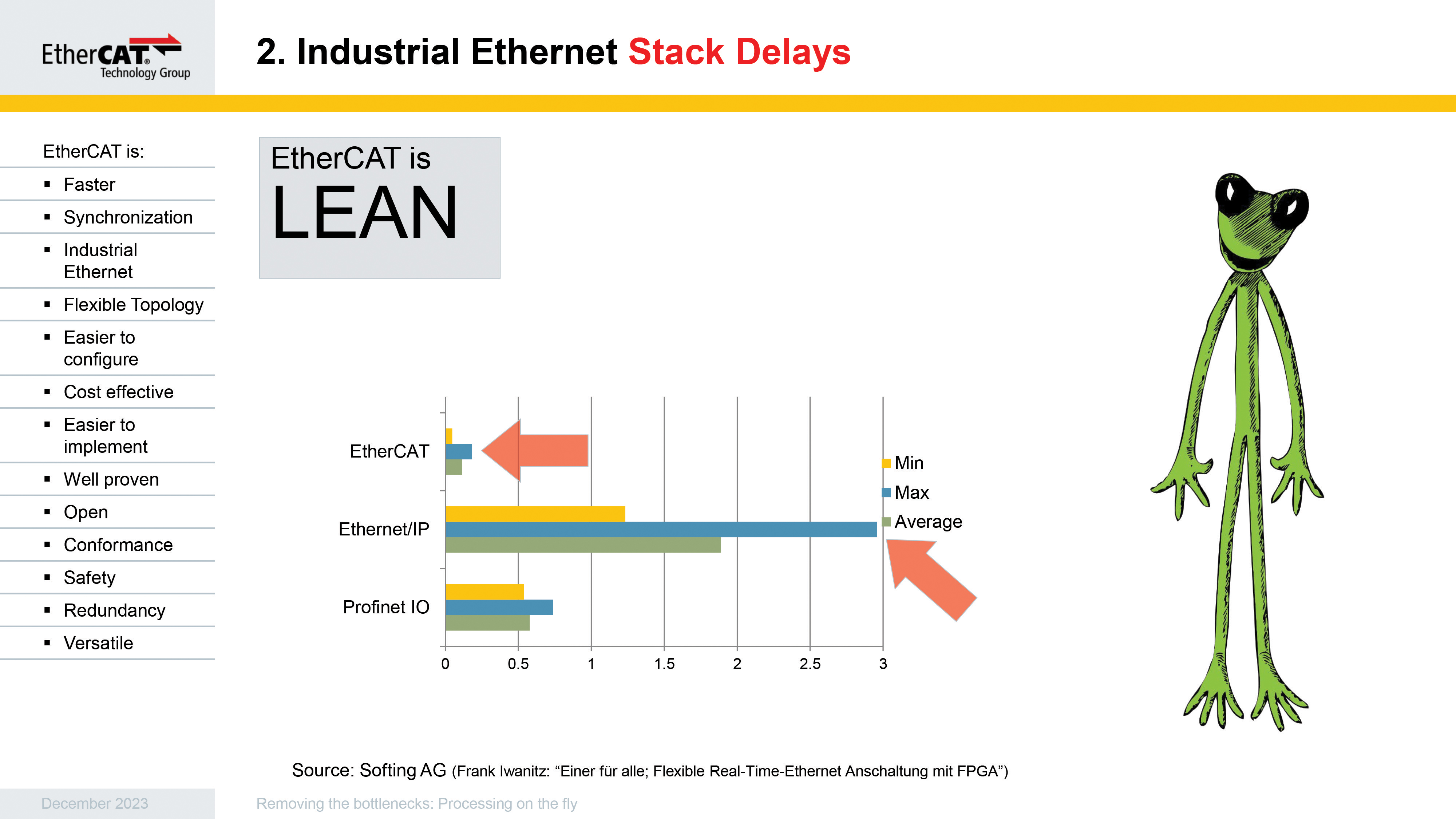
Industrial Ethernet Stack Delays. @ EtherCAT Technology Group, Office Korea
세 번째는 스위치 딜레이다. 스위치는 어떤 데이터가 어떤 순서로 들어오는지 알 수가 없고, 나갈 때 트래픽이 어떻게 발생하는지 알 수가 없기 때문에, 스위치 내에서는 버퍼를 두고 처리를 하게 된다. 따라서 버퍼에서 오는 딜레이 요소가 항시 존재하게 된다. 그리고 또하나 스위치가 가지고 있는 지연요소 가운데 하나는 ‘Store & Forward’ 방식이다. 스위치는 전체 데이터를 보관하기 위해 문제가 있는지의 여부를 확인하고, 다음 목적지로 보내는 과정이 필요하다. 그 과정에서 일반적으로 하나의 프레임을 보낼 때 약 4~122마이크로세크(μs) 정도가 소요가 된다. 이것이 플러스 버퍼 딜레이가 된다.
PROFINET이라고 가정을 해볼 때 이더넷 베이스로 하고 있고, 이러한 디바이스들이 포트가 실질적으로 허브 역할을 하고 있다. 상위에서 보낸 프레임이 각각의 허브들을 거치면서 지원요소가 발생을 하고 이러한 지원요소가 20노드만 거친다고 했을 때, 약 2.5미리세크가 딜레이가 생긴다. 그래서 이러한 리얼타임 요소를 봤을 때는 2.5미리세크는 상당히 큰 장애요소가 될 수 있다. 하지만 EtherCAT은 이러한 지연요소들을 해결할 수 있다.
속도 면에서 EtherCAT은 1,000개의 분산 디지털 I/O를 약 30마이크로세크 내에서 처리가 가능하다. 그리고 100마이크로세크 내에서 100개의 서보 축을 제어할 수 있을 정도로 빠른 퍼포먼스를 가지고 있다. 이런 성능이 가능한 이유는 EtherCAT은 SubDevice 내에서 즉시 처리할 수 있는 구조를 가지고 있기 때문이다. 뿐만 아니라, 별도의 하드웨어, 특화된 하드웨어 없이도 MainDevice에서 일반적인 이더넷 포트를 가지고 MainDevice 역할을 할 수가 있다. 이러한 기능이 가능한 이유는 EtherCAT에서는 Ethernet on the Fly라고 하는 원리를 이용해서 이벤트를 처리하기 때문이다.
EtherCAT의 동작 원리 : Ethernet on the Fly
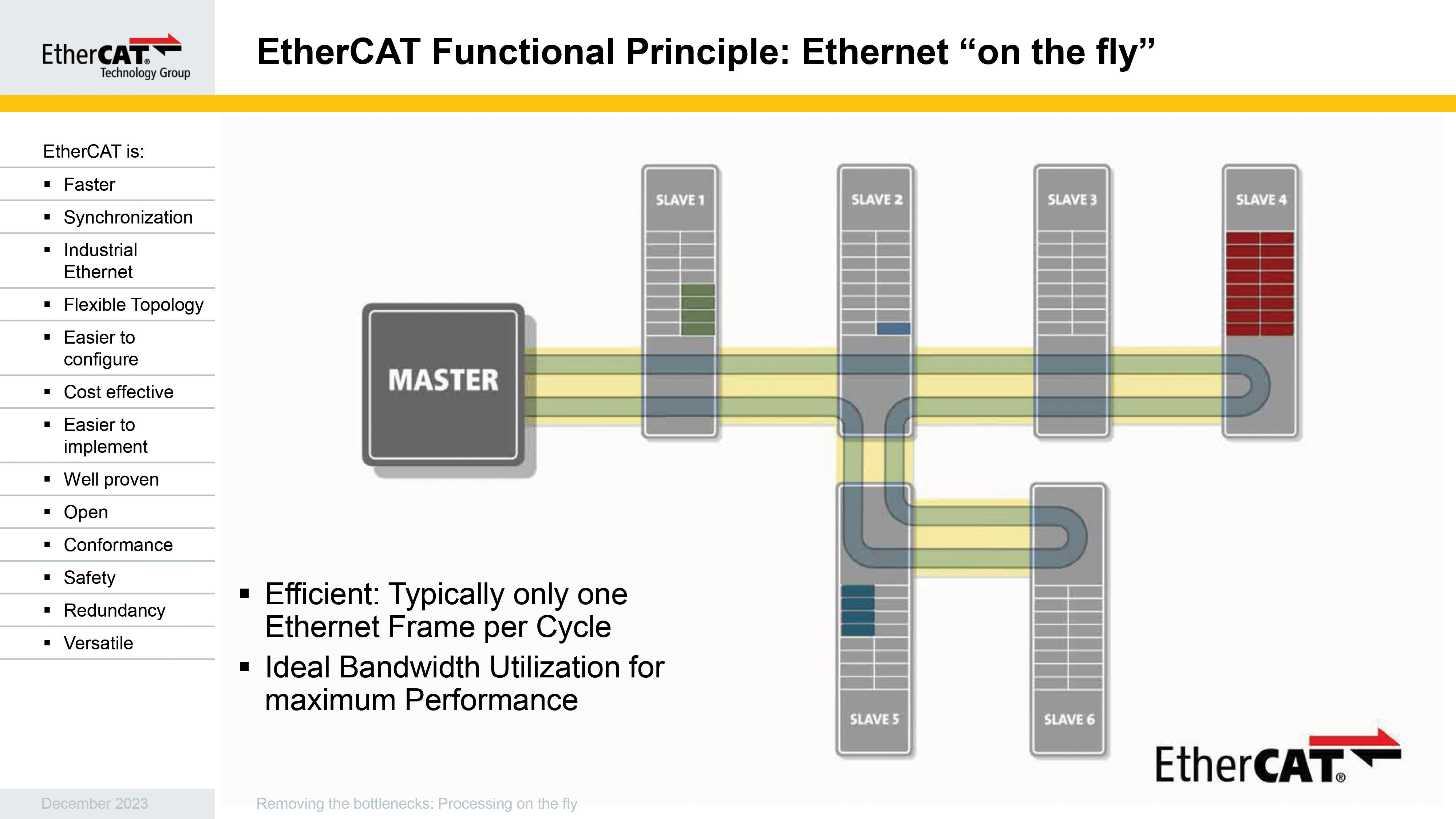
EtherCAT의 동작 원리 : Ethernet on the Fly. @ EtherCAT Technology Group
EtherCAT은 MainDevice에서 나온 프레임이 멈추지 않고 각각의 SubDevice를 통과하는 과정에서 멈춤이 없이 자기가 원하는 SubDevice 내에서 확인하고자 하는 어드레스의 값을 바로 받아서 처리를 한다. 예를 들어서 SubDevice 1번은 입력이라고 하면 입력에 해당하는 데이터만 가지고 와서 처리를 하고, 2번은 출력이라고 했을 때 출력에 해당하는 작업을 해놨다가 프레임에 담아주는 과정을 반복하게 된다.
퍼포먼스 측면에서 EtherCAT의 장점은 너무나 많다.
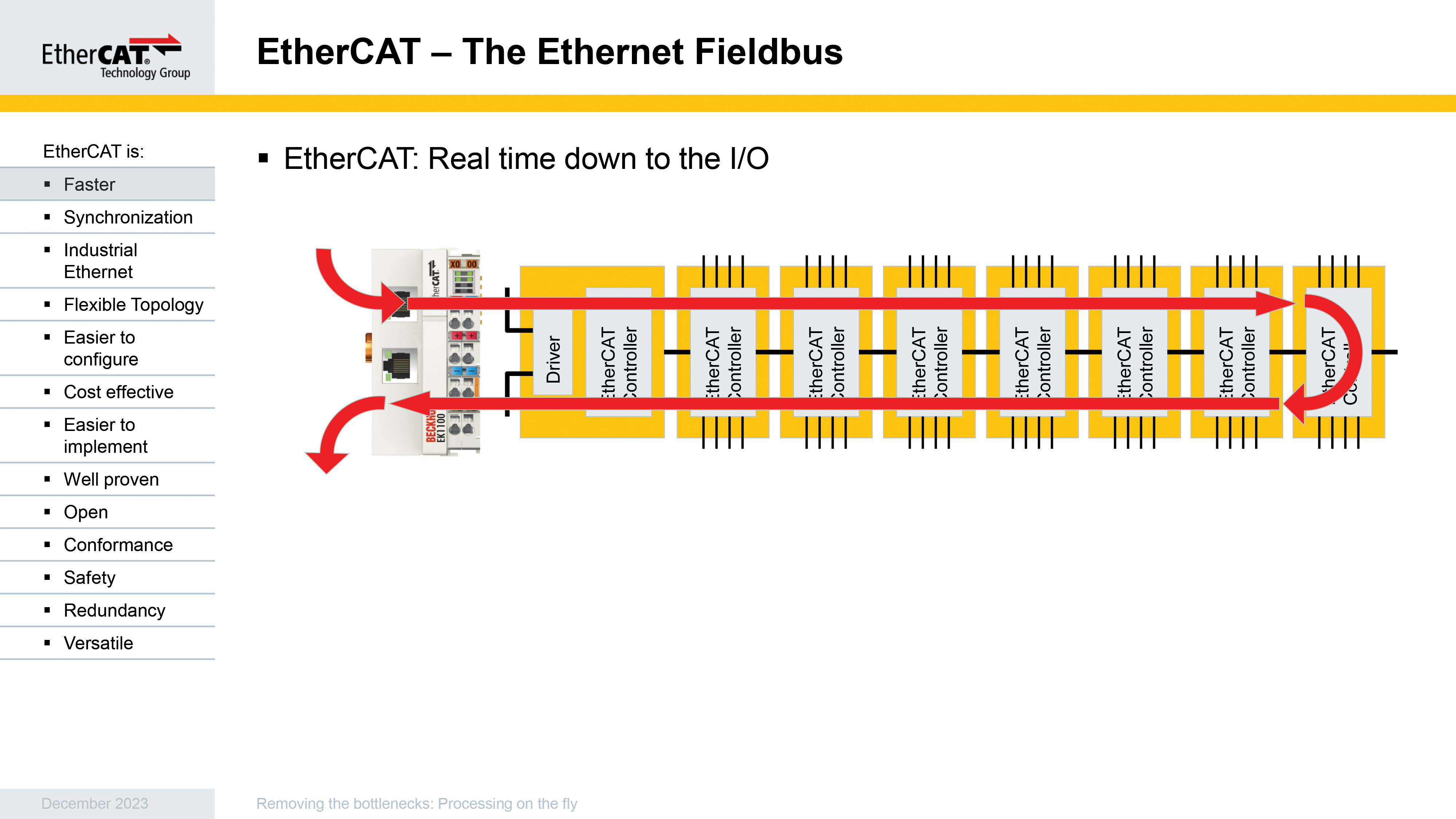
EtherCAT은 I/O 레벨단에서 진행되는 리얼타임 이더넷 필드버스다. 별도의 서브시스템이 존재하지 않는다. 일반적인 분산 I/O의 경우 중간에 MainDevice와 I/O 간에 통신을 위한 게이트웨이가 존재한다. 이 게이트웨이가 I/O의 데이터를 받아서 MainDevice로 보내는 주기를 맡는 역할을 하고 있다. EtherCAT은 별도의 서브 버스 시스템을 가지고 있지 않고 마스터 즉, MainDevice에서 I/O로 바로 통신하는 방식으로 되어있다. 그래서 게이트웨이에서 오는 지연요소가 존재하지 않는다. 따라서 필드에서 사용하는 인풋, 아웃풋, 드라이브, 액추에이터 등이 MainDevice에서 직접 제어하는 방식이다.
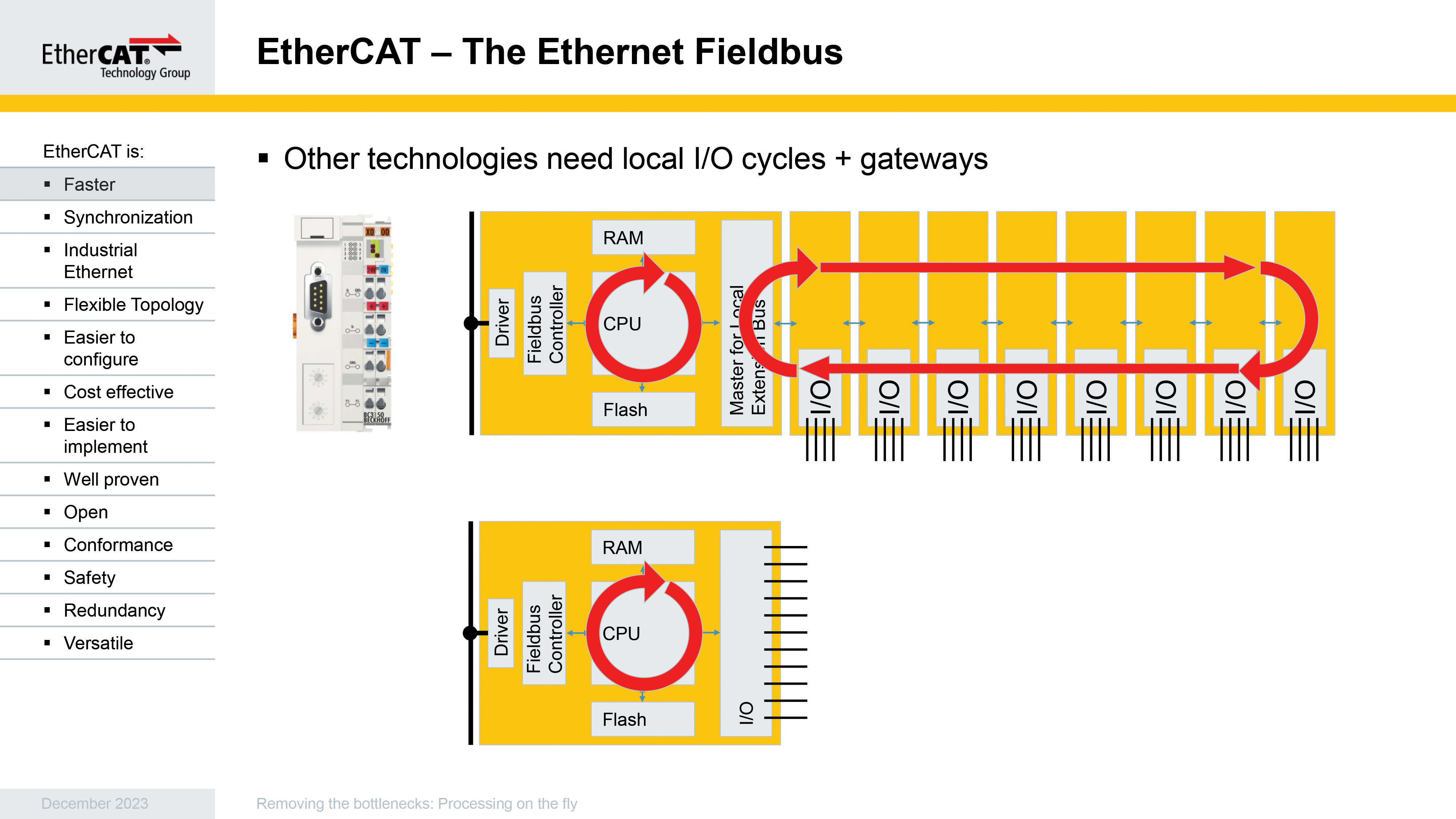
다른 기술에는 로컬 I/O 사이클 + 게이트웨이가 필요하다. @ EtherCAT Technology Group
 0
0
EtherCAT : I/O까지 실시간. @ EtherCAT Technology Group
다음은 가용성 측면에 대한 설명이다.
첫 번째 비용적 측면을 보면, 네트워크 환경을 구축할 때 많은 비용을 차지하는 것이 인프라 구조 부분이다. 네트워크 토폴로지를 구성하기 위해서 허브 종류를 많이 사용한다. 하지만 EtherCAT은 허브가 별도로 필요하지 않다. 일반적인 커넥터나 케이블만으로도 충분히 토폴로지를 구성할 수 있다. 그 이유는 서브 시스템 내, ASIC 내에서는 4개의 포트를 가지고 있다. 앞선 노드에서 받을 수 있는 포트, 자신을 통해서 나갈 때 연결되는 포트, 그리고 2개의 포트를 가지고 있다. 그래서 이러한 포트를 활용해서 스위치 역할로 사용할 수 있고, 라인 토폴로지나, 스타/트리, 드롭 라인 토폴로지를 65,535개의 SubDevice 내에서 구성을 할 수 있다.
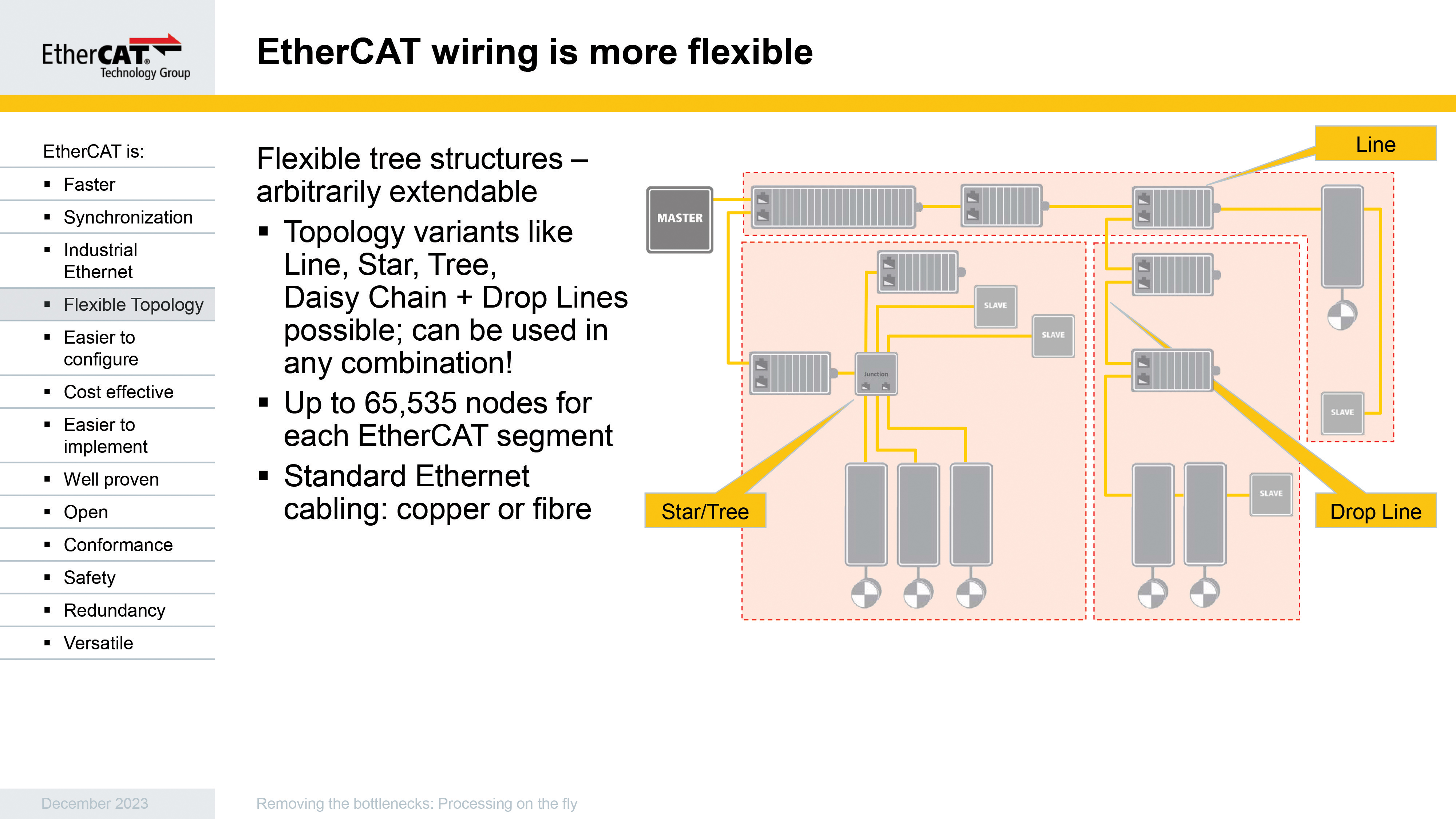
EtherCAT은 라인 토폴로지나, 스타/트리, 드롭 라인 토폴로지를 65,535개의 SubDevice 내에서 구성을 할 수 있다. @EtherCAT Technology Group
EtherCAT은 이더넷을 베이스로 하기 때문에 일반적인 이더넷 케이블이나 RJ45 커넥터를 활용할 수 있고, 일반적인 이더넷을 사용하기 때문에 2개 노드 간의 거리는 100미터 정도가 된다. 더 긴 길이가 필요할 경우에는 광케이블을 이용해서 20키로미터까지 늘릴 수 있다. 그리고 짧은 거리에서는 LVDS(Low voltage differential signaling, 저전압 차등 시그널링) 통신도 가능하다. 물리계층 간의 전환도 가능하다. RJ45에서 광으로, 광에서 RJ45로 전환하는 것도 가능하다. 이렇게 해서 인프라 구조의 비용을 개선할 수 있다.
EtherCAT은 특화된 MainDevice를 사용하지 않는다. 소프트웨어로도 MainDevice를 처리할 수 있어서 MainDevice에서 오는 비용도 절감된다. 그리고 CPU가 없기 때문에, SubDevice에서도 상당히 가격을 줄일 수 있다.
EtherCAT이 출시된 지 20년이 지났다. SubDevice를 개발하기 위한 많은 칩셋들이 아직까지 개발되고 있고, 이러한 칩셋들을 활용해서 많은 회원사들이 개발을 이어나가고 있다. 현재까지 MainDevice를 판매하는 벤더는 248개 회원사가 있고, EtherCAT I/O 제품을 개발해서 판매하는 회원사는 176개에서 약 1000개 정도의 EtherCAT SubDevice 제품을 판매하고 있다. 드라이브의 경우에는 232개 회원사에서 약 1000개의 SubDevice를 개발하고 있다. 이렇듯 공급망이 다양해지면 사용자의 선택폭이 넓어지고 이러한 다양성은 결과적으로 가격을 낮추는 효과가 있다.
효용성 문제에서 고민을 해야 하는 것은 호환성 문제다. EtherCAT은 이더넷을 기반으로 하고 여전히 이더넷을 지원하고 있다. 그래서 기존에 사용하던 이더넷 베이스의 제품들을 그대로 사용할 수 있다. 그 원리는 EtherCAT은 이더넷을 터널링한 부분이 있기 때문이다. 내부적으로 보면 EtherCAT을 통해서 들어온 이더넷 프레임은 세그먼트 단위로 쪼개져서 SubDevice 내에서 합쳐진 다음에 다른 루트를 통해서 전달되는 과정을 거치고, 마찬가지로 입력된 데이터도 세그먼트 단위로 쪼개져서 EtherCAT을 통해서 전달되는 과정을 거칠 수 있기 때문에, 기존의 데이터들은 호환성을 유지하면서도 사용할 수 있게 된다. 그래서 이런 과정을 위해서는 미리 어떤 루트를 통해서 이더넷 프레임이 전달될지를 정하기만 하면 되는데, 그 루트가 될 수 있는 것은 MainDevice에 버추얼 이더넷 스위치 포트일 수도 있고, 아니면 PC 스위치 포트일 수도 있고 웹서버일 수도 있다. 루트만 정해지면 MainDevice에서는 EtherCAT 포트가 어떻게 구성되어 있는지를 몰라도 기존에 사용하던 IP주소를 가지고 여전히 이더넷 통신을 유지할 수 있다.
이더넷뿐만 아니라 현재 39개의 회원사에서 EtherCAT을 통해 다른 프로토콜로 전환하는 컨버터 제품들을 많이 개발하고 있다. 이런 컨버터 제품들을 활용할 경우에는 디바이스넷, 시리얼 같은 제품을 EtherCAT으로 변환해서 사용할 수 있다.
효용성 측면에서 봤을 때 마지막으로 이슈가 될 수 있는 것은 동기화다.
기존 제품들과 호환성을 유지하면서 동기화 기능을 추가하는 것은 비용적인 측면에서나 기술적인 측면에서 상당히 어렵다. 하지만 EtherCAT은 빠른 시스템일 뿐만 아니라 이런 동기화에서도 상당히 큰 메리트를 얻을 수 있다.
예를 들어서 빠른 시스템에서도 동기화는 좀 더 중요해진다. 왜냐면 5마이크로세크로 동작하는 어떤 시스템이 있고 허용 지트가 5마이크로세크라고 보고 있다. 이 시스템의 퍼포먼스를 위해서 100마이크로세크로 낮췄을 때 5마이크로세크는 상대적으로 큰 수치일 수 있다.
EtherCAT이 동기화하는 방식은 어렵지 않다. EtherCAT은 MainDevice에서 나온 프레임이 전체 노드를 거쳐서 다시 MainDevice로 복귀하는 과정으로 되어있고, 그 과정 내에서 모든 SubDevice를 프레임을 닫고 처리할 수 있다. 그래서 SubDevice 입장에서 전달된 프레임과 다운로드에서 온 프레임의 시간을 측정할 수 있고, 전체 네트워크 상에서 DC(Distributed Clocks) 동기화 기능을 가지고 있는 모든 SubDevice들이 이런 시간을 측정을 하게 되면 각각의 SubDevice가 가진 루틴과 전달시간을 계산해낼 수가 있다. 이런 시간을 계산하기 위해서 굳이 MainDevice가 가지고 있는 정밀한 고속 타이머를 이용할 필요없이 SubDevice내에 첫 번째 DC 기능을 가진 SubDevice의 레퍼런스 타임을 이용할 수 있다. 이렇게 될 경우, MainDevice의 지터에 무관하게 SubDevice 내에서 시간을 계산할 수 있어서, MainDevice의 성능과 상관없이 정밀한 동기시간을 가지게 된다.
EtherCAT DC 데이터는 정확하다. 300개의 노드를 가지고 있는 SubDevice의 인터럽트를 체크했을 때 지터가 불과 20ns(나노세크)밖에 되지 않는다. 실제 현장에서는 70~80나노세크가 걸린다고 한다. 일반적으로 1마이크로세크 정도가 좋은 퍼포먼스를 가진 동기화 기능이라고 했을 때, EtherCAT이 가진 70~80나노세크는 10배나 많은 정밀한 동기화 기능을 가졌다고 얘기할 수 있다.
하나의 싱글노드에서 뿐만 아니라, 전체 노드에서도 EtherCAT 브릿지를 사용할 경우에는 전체 네트워크의 동기화를 이룰 수 있다.
각 노드의 레퍼런스 클럭으로 활용되는 첫 번째 노드를 브릿지로 활용할 경우에는 브릿지끼리 시간에 대한 동기화가 이루어지고, 각 노드에서는 이러한 브릿지를 대상으로 해서 각 SubDevice들이 동기화가 되기 때문에, 결과적으로 전체 네트워크가 동기화되는 결과가 된다. 뿐만 아니라 EtherCAT은 동기화된 필드레벨에서 이루어지는 기술이기 때문에, MainDevice의 영향 없이도 SubDevice 내에서 이룰 수가 없다. 그래서 MainDevice의 소프트웨어를 변경하지 않더라도 이 기능을 활용할 수 있다. 따라서 퍼포먼스 측면이나 가용성 측면에서도 EtherCAT은 현명한 해결방식이 될 수 있다.
다음은 실용성 측면이다.
네트워크를 사용하다보면 몇 가지 문제점이 있다. 네트워크 케이블 문제나 MainDevice 자체적인 문제가 있을 수 있다. 이에 대한 복구방법인데 EtherCAT은 케이블 이중화 기능을 가지고 있다. 예를 들어서 노드가 있고 중간에 노드와 노드 사이의 케이블에 문제가 발생했을 때, 문제가 발생한 뒤쪽 노드에서는 통신이 이루어지지 않는 결과가 있을 수 있다. 하지만 MainDevice의 세컨더리 포트의 링형으로 네트워크를 구성하게 되면, 어떤 문제가 발생하더라도 세컨더리 MainDevice를 통해서 약 15마이크로세크 내에서 스위치가 이루어지면서 기존 데이터를 복귀하는 솔루션이 있다.
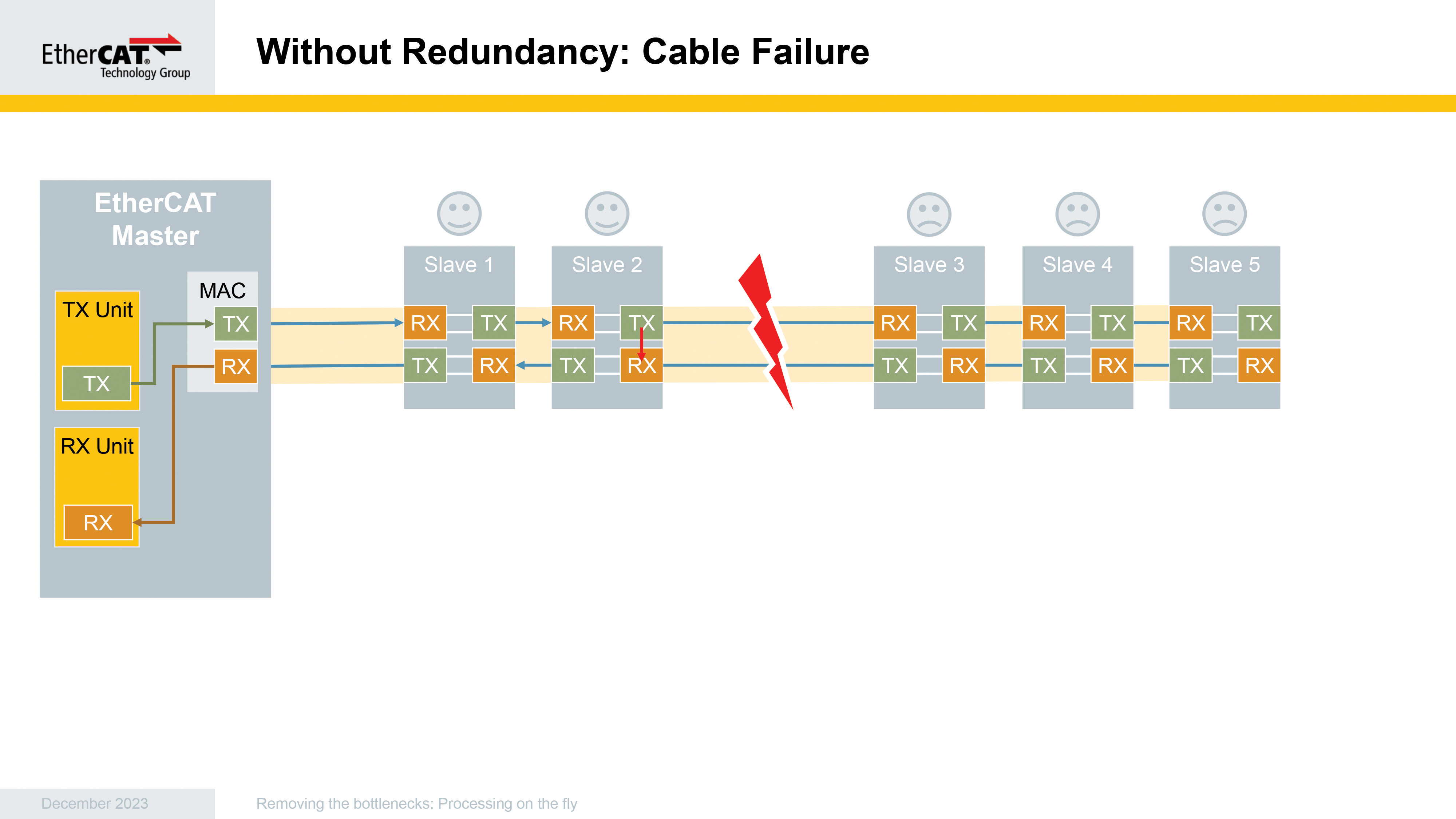
이중화 기능이 없을 때 케이블 고장. @ EtherCAT Technology Group
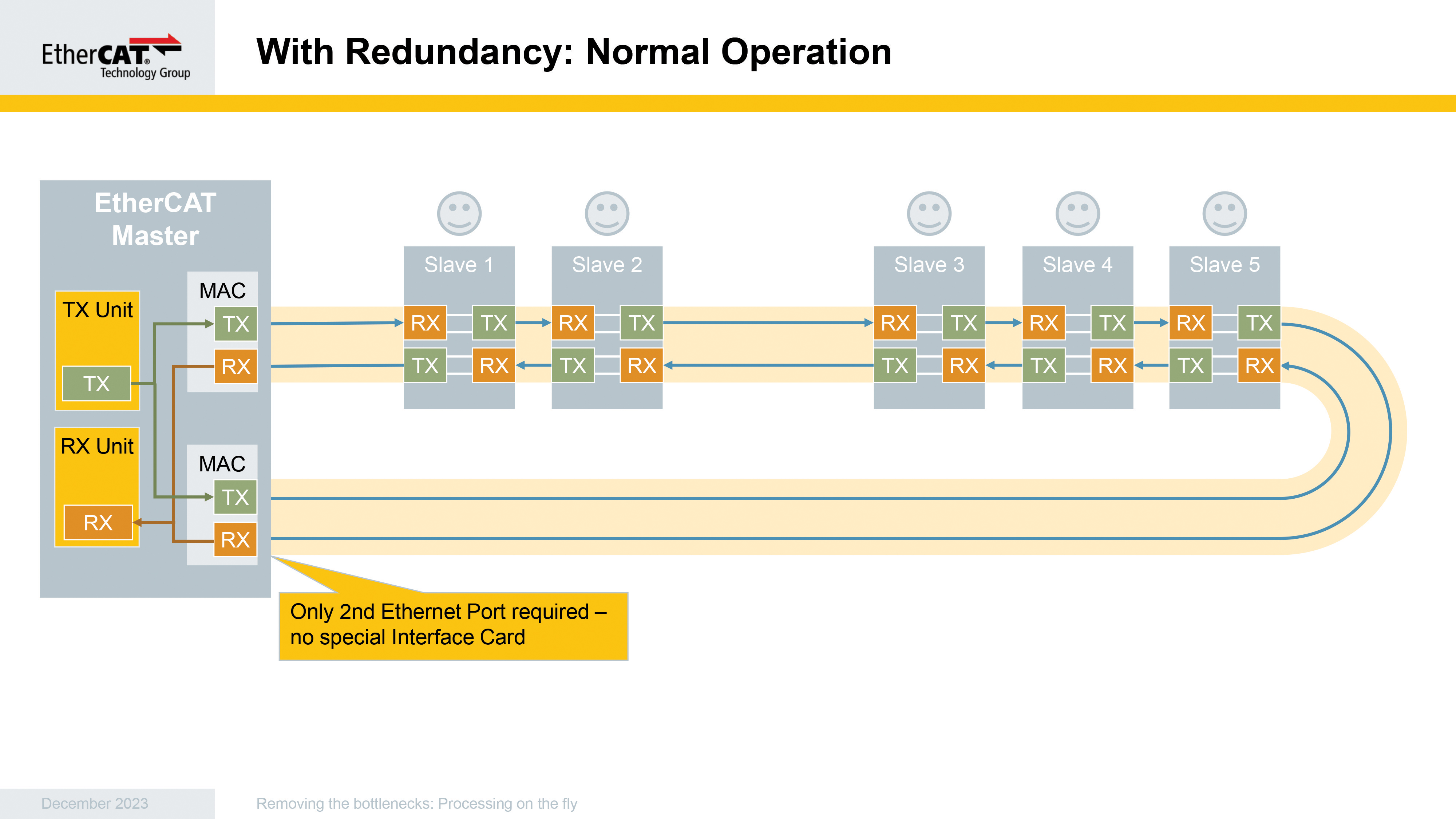
이중화 기능이 있을 때 정상 동작. @ EtherCAT Technology Group
EtherCAT Automation Protocol (EAP)
EAP는 MainDevice to MainDevice 솔루션이다. EAP 기능을 가져오면서 필드레벨에서 이루어지는 데이터 처리를 할 수 있는데, 예를 들어서 ERP 통신을 한다든지 어떤 데이터를 UI로 보낸다든지, MainDevice와 MainDevice끼리 통신을 할 때는 EtherCAT의 EAP를 활용할 수 있다. 예를 들어서 필드레벨에서는 리얼타임을 위해서 EtherCAT으로 노드를 구성하고 MainDevice끼리는 EAP를 활용해서 데이터를 주고받을 수 있다. 라인공정의 경우에는 EAP가 상당히 유용하게 사용될 수 있다. 그리고 현장에 라인 컨트롤러가 별도로 있을 때는 EAP의 멀티 폴링방식 프로토콜을 사용하게 되면 좀 더 빠르게 MainDevice의 정보들을 취합할 수 있다.
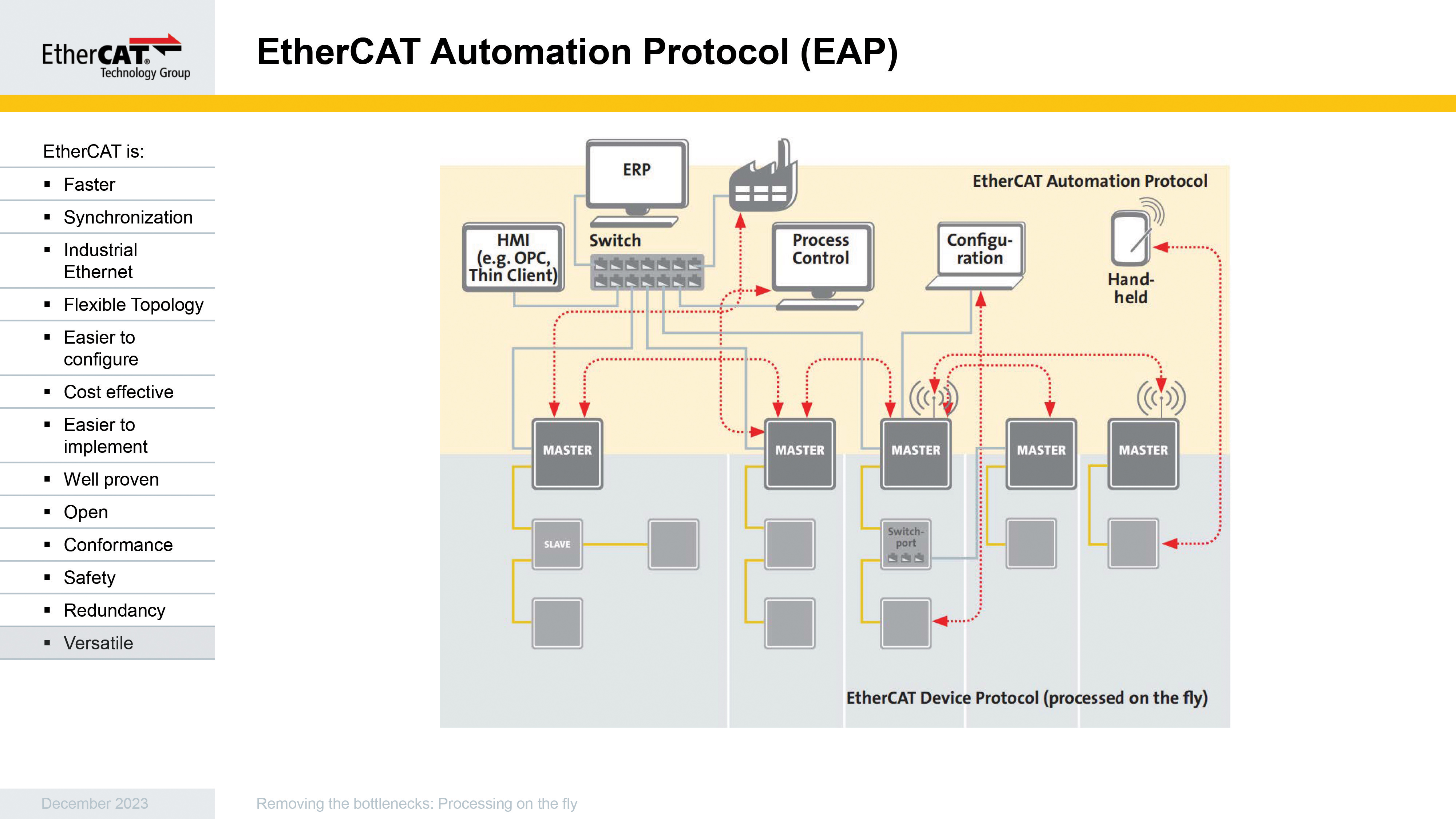
EtherCAT Automation Protocol (EAP). @ EtherCAT Technology Group
몇 년 전부터 산업계에서 세이프티(Safety) 기능을 많이 활용하고 있다.
EtherCAT도 세이프티 기능을 활용할 수 있는데, Safety over EtherCAT이라는 이름의 세이프티 프로토콜을 지원하고 있다.
Safety over EtherCAT 기능은 블랙채널 방식을 지원하기 때문에, 이 프로토콜 전체의 안전인증을 받을 필요는 없다. 이 세이프티 기능은 상당히 유연하기 때문에, 네트워크 상에서 필요로 하는 요소들, 세이프티 인풋이나 세이프티 아웃풋 등을 네트워크 상의 어떠한 위치에서도 활용이 가능하다. 그래서 세이프티 PLC는 네트워크 상에 연결해서 사용이 가능하기 때문에, 값비싼 세이프티 PLC를 사용하지 않고서도 세이프티 기능을 충분히 활용할 수 있다.
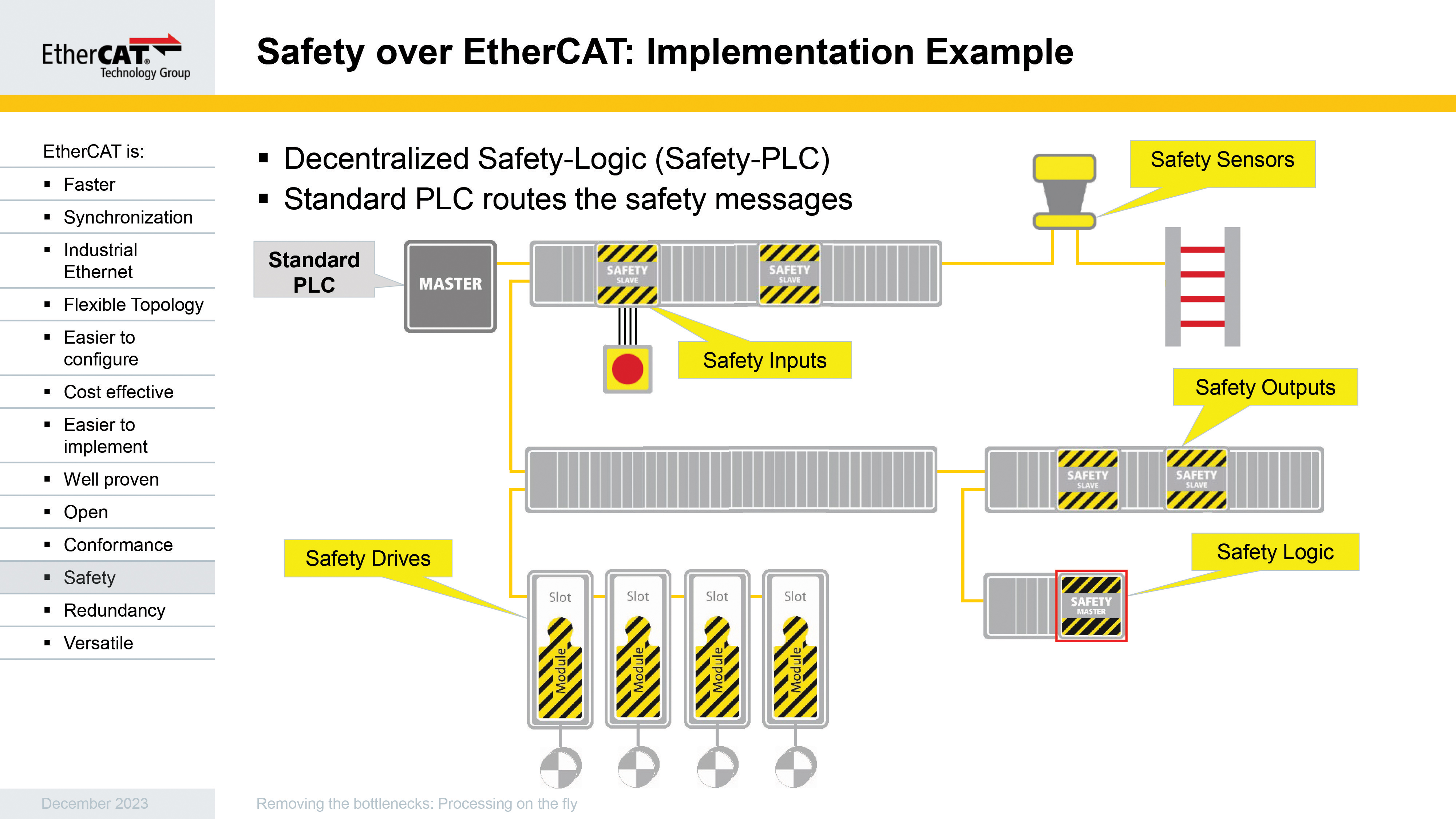
Safety over EtherCAT - 세이프티 PLC를 네트워크 상에 연결해서 사용이 가능하기 때문에 값비싼 세이프티 PLC를 사용하지 않고서도 세이프티 기능을 충분히 활용할 수 있다. @ EtherCAT Technology Group
현재까지 Safety over EtherCAT을 구현한 회원사는 약 60개에 이른다.
이처럼 EtherCAT은 가장 빠르면서 정확한 필드버스 시스템이다. 이러한 시스템을 활용하게 되면 고객의 어플리케이션 퍼포먼스를 최대한 활용할 수 있다.
EtherCAT은 어플리케이션의 실행속도를 최적화할 수 있다. 제어 시스템 구축에 필요한 비용을 절감할 수 있다. 필요 하드웨어가 감소하고, 네트워크 구성이 간단하기 때문에 구성작업 시간을 줄일 수 있다
EtherCAT은 글로벌 표준이다. 글로벌 표준으로 적용할 수 있기 때문에 안정적이고 신뢰성 있는 제품들을 사용할 수 있다. 특정 공급업체에 종속되지 않는 오픈시스템(Open-System)이기 때문에 유지보수가 원활하게 이루어질 수 있다. 또, 안정적으로 기능을 통합할 수 있어서 갑작스럽게 발생할 수 있는 위험요소로부터 고객의 시스템을 안정적으로 보호하고 유지할 수 있다. 안전기능을 통합할 수 있다.
지금까지 많은 회원사에서 EtherCAT을 도입해서 성공적인 결과를 이루어냈다. EtherCAT은 고객의 장비를 업그레이드하고 많은 영업기회를 줄 수 있는데, 이것은 성장기회다.
3. EtherCAT G 사이버 보안 - ETG 본사 Martin Rostan 협회장
사이버 보안이 IT 세계에서만이 아니라, 필드버스 쪽에서도 중요한 화두가 되고 있다. 그 이유는 사이버 보안 공격이 필드버스에 대해서 이루어지기 때문은 아니다. 그렇지만 산업용 이더넷 시대가 열리게 되면서 해커들이 훨씬 더 기회가 많아지고 있고, 새로운 법들이 입법되고 있기 때문에, 모든 네트워크 디바이스에서 사이버 보안을 확보해야 한다. 유럽의 경우에도 몇 주 전에 사이버회복탄력성법이 EU에 의해서 입법됐다. 사이버 보안을 모든 디바이스에 추가해야 하는 시기가 이제 3년밖에 남지 않았다. 인터페이스가 있는 디바이스라면 모든 디바이스에 사이버 보안이 추가가 되어야 한다. 밸브에도 포함되어 있고, 네트워크에 연결되어 있는 세탁기도 마찬가지다. 디지털이고 네트워크 인터페이스가 포함되어 있다면 사이버 보안 조치가 반드시 포함되어야 한다. 이것이 가장 큰 도전과제이고 앞으로 유럽에서 가장 큰 화두가 될 것이다.
마틴 협회장은 본 발표를 통해 EtherCAT이 이런 추세에 어떻게 대응하고 있는지, 사이버보안에 관해서 어떤 입장인지 설명했다.
사이버 보안 탄력성이 필요하고 해킹이 어려운 시스템이어야 한다는 것이 도전과제다. 사이버공격이 어려운 시스템이 돼야 한다. 이렇게 되기 위해서는 두 가지 측면을 생각해야 하는데, 첫 번째는 시스템 아키텍처, 두 번째는 프로토콜 그 자체다.
시스템 아키텍처는 간과하기 쉽다. 많은 사람들이 자동화 피라미드가 아주 명확하게 구조화된 아키텍처라고 하지만, 이것은 예전 방식이다. 이제는 자동화 네트워크를 봐야 한다. 모두가 서로 소통하고 있는 방식이다. 모두가 서로 연결이 되어 있기 때문에 더 이상 위계질서도 없고 컨트롤만 하는 경우도 없고, 컨트롤만 받는 경우도 없다.
EtherCAT의 경우에는 여전히 위계질서가 있는 구조가 좋다고 생각한다. 왜일까? 명백한 구조가 있을 때에는 컨트롤러를 방어만 하면 된다. 왜냐면 컨트롤러 아래쪽에 있는 부분은 외부세계에 노출되어 있지 않고 컨트롤러만 노출되어 있기 때문이다. 필드버스 네트워크와 공장 네트워크를 분리하는 것이 필요하다. 이것이 되기 위해서는 아래쪽에 있는 시스템 자체가 스스로 사이버 공격에 대해서 탄력성이 있어야 한다. 아키텍처가 전부는 아니겠지만 바로 공격에 대한 노출을 줄이기 위해서 꼭 필요한 부분이다. 그런데 만약 메시 네트워크여서 모두가 서로에게 연결된 상태라면 스위치와 노드가 모두 다른 노드와 직접 연결이 될 때는 모든 디바이스가 보호되어야 한다. 왜냐면 모든 보호가 모든 공격으로부터 노출이 되어있기 때문이다. 메시형태는 일견 좋아 보인다. 모든 디바이스를 다 보호하면 되지 않느냐고 얘기할 수 있다. 그런데 그렇게 되기 위해서는 암호화도 필요하고, 인증서도 필요하고, 또 인증서가 다양하게 필요한데, 인증서가 만료되기도 하기 때문에, 인증서 관리 시스템도 필요하고, 하드웨어와 소프트웨어도 더 많이 필요하고, 유지보수도 더 많이 필요하다. 그리고 단순히 하나의 부품을 가져와서 바로 바꾸기가 어렵다. 이것을 바꾸고 나면 인증서가 만료될 수 있기 때문이다. 따라서 일각에서는 24시간 부품을 계속 전기를 공급해서 바로 교체할 수 있도록 하자라고 얘기하기도 한다. 이렇게 되면 굉장히 복잡해지고 비용도 올라갈 수밖에 없다. 따라서 사이버 보안을 모든 I/O 노드에 추가하는 방식은 피해야 한다고 생각한다.
EtherCAT으로 이것이 가능한가? EtherCAT에 어떠한 사이버 보안 특성이 있나?
사이버 보안은 물론 중요하고 제대로 보호가 되어야 한다. 사이버 보안은 필요하다. 모든 시스템은 해킹이 가능하다, 해킹이 가능한지가 중요한 것이 아니라, 해킹하는데 얼마나 많은 노력이 필요한지가 중요하다.
EtherCAT은 왜 특별하고 다른가?
두 가지 공격 팩터가 있다. 우선 원격공격이 이루어질 수 있다. 외부에서 이루어지는 것이다. 시스템 밖에서 공격할 수도 있고, 혹은 안에서 즉 네트워크에 대한 물리적인 접근이 있는 상태에서 공격하는 경우가 있다. 원격공격으로부터 보호를 해야 하는데, EtherCAT은 보호가 되어있다. 그러나 동시에 물리적인 공격이어도 공격시간이 다양하고, 이것은 사이버 보안 이상이다. 따라서 물리적인 접근과 원격접근을 구분할 필요가 있다. 멜웨어의 99.9% 거의 100%는 IP에 있다. 따라서 돌아다닐 수가 없다. 라우터를 통과할 수가 없다. EtherCAT은 IP기반이 아니다. EtherCAT은 이더넷 프레임을 직접적으로 사용한다. EtherCAT만의 EtherType이 있고, EtherCAT 헤더 안에는 EtherCAT Type이 있다. EtherCAT 칩은 EtherType과 EtherCAT Type이 맞아야만 프로세싱이 된다. 다른 프레임은 모두 하드웨어로 버리게 된다. EtherCAT에 모르는 프레임이 들어오면 하드웨어 단에서 멈추게 된다. 이것은 서비스 보호를 하지 않는 것일까? 아니다. EtherCAT 칩에 100% 다양한 것들을 다 넣더라도 EtherCAT 주소가 제대로 되어있지 않으면 바로 버리기 때문에 처리하지 않는다. EtherCAT 칩은 과부하가 걸릴 수가 없는 것이다. 아니면 SubDevice를 하나 더 추가해서 잠입할 수 있을까? 가지고 들어올 수 있지만 네트워크에 대한 물리적 접근, 즉 사이트에 와야만 가능하다. 이 디바이스가 펌웨어를 갖고 있더라도, 이 디바이스가 해킹이 돼서 갖고 들어오더라도, 이 디바이스는 스스로 네트워크에서 가동할 수가 없다. MainDevice에 의해서만 가동이 될 수 있다. 또한 사용하지 않는 포트는 MainDevice에 의해서 모두 잠글 수 있기 때문에, 뭔가를 끼워넣고 그냥 통신에 참여할 수는 없다. 따라서 디바이스를 추가하더라도 네트워크 공격은 어렵다. 이론적으로는 디바이스를 만들어서 그 안에 수정된 하드웨어를 추가할 수도 있다. 그러나 전체 CPU가 네트워크 통신에 참여한 것은 아니기 때문에 도움이 되지 않을 수 있다. 하드웨어 디자인을 하면서 표준적인 EtherCAT 칩을 추가하더라도 원하는 데이터를 가져가기 어려울 수 있다. 이론적으로는 위험한 SubDevice를 만들 수도 있다. 그러나 그러기 위해서는 칩을 새로 개발해야 한다. 그렇게 되면 몇 년씩 시간이 걸릴 수도 있는데, 몇 년이나 투자해서 발생할 수 있는 것은 어플리케이션 조작 하나 다운시키는 것밖에는 없다. 그런데 이렇게 되기 위해서는 현장에 들어가서 물리적으로 들어가서 SubDevice를 바꿔야 한다. 그리고 만약 물리적으로 기계가 있는 곳으로 들어갈 수 있다면 수정된 칩을 가지고 있는 하드웨어를 가지고 들어가는 것보다 훨씬 더 다운시킬 수 있는 빠른 방법들이 많이 있다. 그래서 이러한 방법으로는 비효율적이어서 공격이 이루어지지 않는다. 물론 MainDevice는 보호가 돼야 한다. 그리고 사이버 보안에 대한 IT 시스템들은 MainDevice에 적용이 돼야 한다. 외부로부터 보호가 돼야 한다. 그러나 이것은 EtherCAT 역량을 벗어나는 것이고, 또 필드버스와 아무 상관이 없다. EtherCAT 네트워크를 공격하기 위해서는 물리적으로 들어가야 하고 그렇게 되더라도 거의 불가능하다. 왜냐 하면 외부에 있는 공격요소들이 훨씬 더 가능성이 크기 때문이다. EoE(Ethernet over EtherCAT)에 대해 우려를 하고 있다면 이것으로써 EtherCAT을 해킹하기는 어렵다. EtherCAT 자체는 이것으로도 공격받기는 어렵다. 하나의 터널 역할을 하고 있기 때문이다.
공격면적이 EtherCAT에서 훨씬 줄어들게 된다. 위계질서가 분명한 아키텍처를 사용하고 있기 때문이다. 뿐만 아니라 EtherCAT의 다양한 특성으로 인해 해킹이 어렵고 그러면 해킹의 비용이 많이 들어가기 때문에 실제 해킹이 이루어질 가능성이 매우 낮아지는 것이다. EtherCAT은 단순히 강건성이 높다기보다는 내재적으로 사이버 보안에 대해서 보호되고 있다.
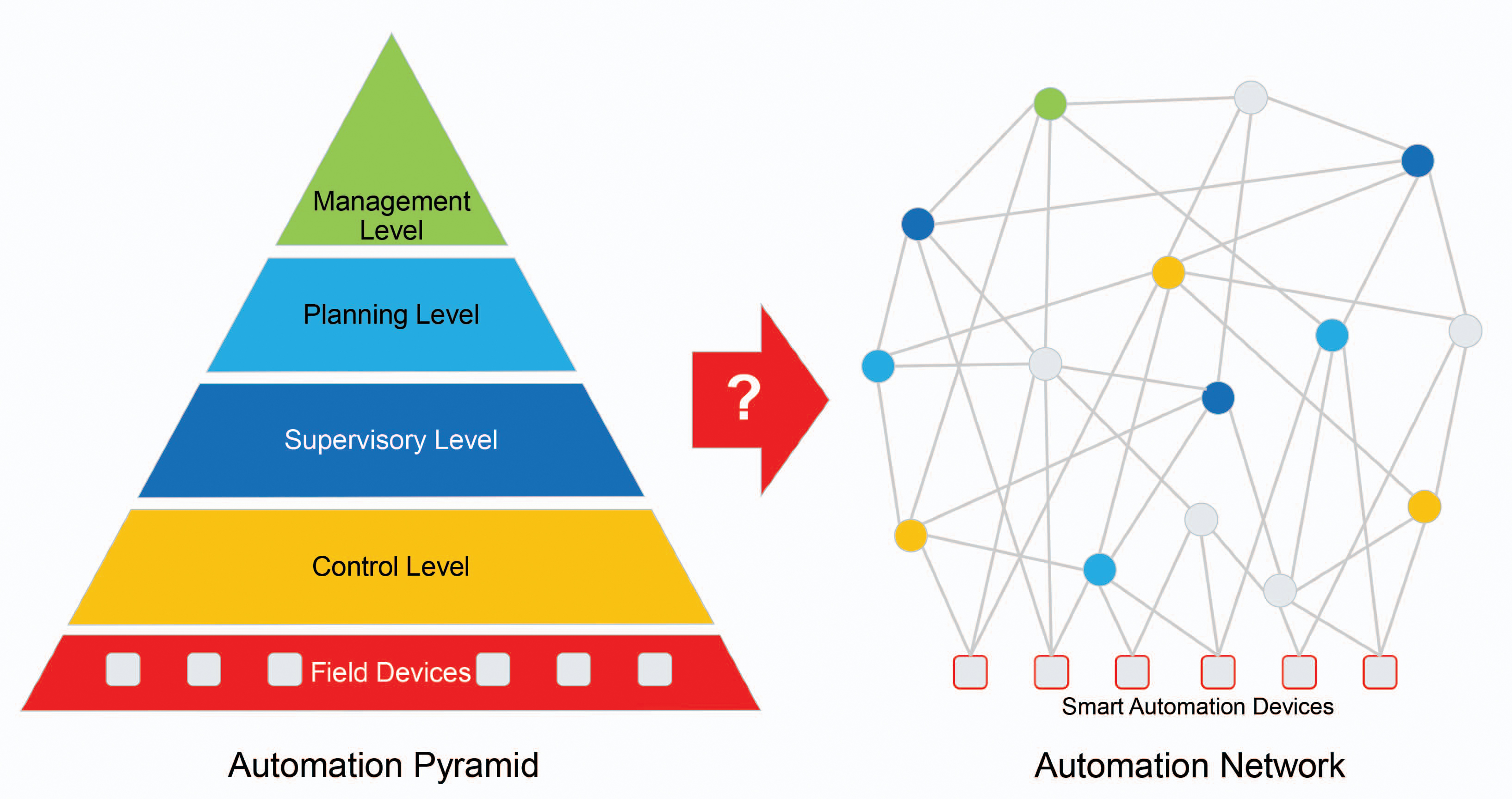
EtherCAT 위계질서가 분명한 아키텍처를 사용하고 있기 때문에 공격면적이 훨씬 줄어들게 된다. @ EtherCAT Technology Group
4. 고급 진단: 빠른 설치와 다운타임 감소 - ETG Office Korea 정명오 부장
필드버스에서 고장진단과 예방은 생산이 중단되는 시간을 줄여서 사용자의 손실을 최소화하기 위한 필수적인 요소다. EtherCAT 자체가 필드에서 발생하는 고장 자체를 막을 수는 없지만 어떤 문제로 인해서 어떤 위치에 문제가 발생했는지에 대한 정확한 진단정보를 제공한다.
필드에서 다양한 문제가 발생할 수 있다. EtherCAT은 여러 가지 타입의 문제를 진단할 수 있는 두 가지 종류의 진단정보를 제공한다.
첫 번째는 빠른 리액션 타입(Cyclic)이다. 어떤 문제가 발생했을 때 즉시 그에 대한 리액션을 하기 위한, 주기적으로 실행하는 진단정보다. 두 번째는 위치나 문제에 대한 여부를 판단하기 위한 비주기적인 진단정보(Ayclic)다.
주기적인 진단정보는 모든 SubDevice들이 일관된 방식으로 매 주기마다 실행되는 것을 보장하고 있다. SubDevice의 어플리케이션에서는 자기가 받은 프로세스 데이터를 처리하고 처리결과를 리턴하는 기능이 매 주기마다 들어가 있다 그리고 상태를 항시 감시하고 있다가 어떤 문제가 발생했을 때 즉시 처리할 수 있는 상태 머신(State Machine) 기능이 추가가 되어 있다. 그리고 동기화 상태를 모니터링하는 기능도 매 주기마다 실행되고 있다. 매 주기마다 실행되고 있기 때문에, 어떠한 문제가 있는지를 정확하게 진단하기 위해서 SubDevice들의 레지스터 정보들을 제공한다.
두 번째는 비주기적인 진단정보(Acyclic)이다. 네트워크 토폴로지의 어떤 위치에서 문제가 발생했는지 해당 슬레이브 즉, SubDevice의 ID는 무엇인지, PC 연결이 끊어졌는지 이런 것들을 하드웨어 진단정보로서 확인이 가능하다. 소프트웨어 진단에서는 상태 머신 에러를 통해 소프트웨어를 진단할 수 있다.
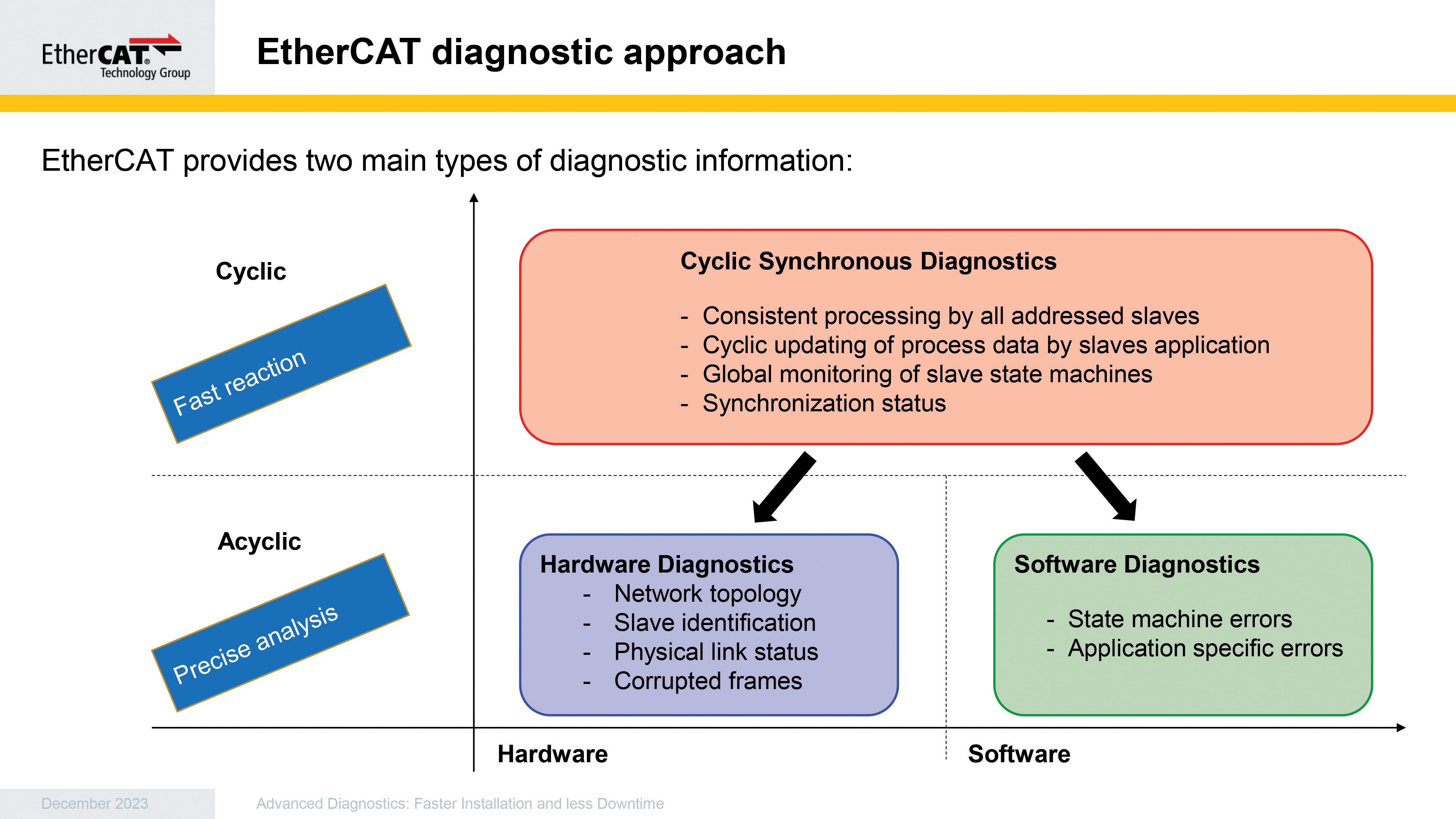
EtherCAT 진단 접근법 2가지. @ EtherCAT Technology Group
네트워크에 있는 모든 SubDevice가 모든 프레임에 대해서 진단정보를 생성하게 된다. 예를 들어서 어떤 모듈에서 악성 프레임을 받아봤더니, 그 프레임에 어떤 문제가 있다고 하면 그 문제에 맞게 특정 카운터들을 증가시킨다. 그 이유는 그다음에 있는 노드들은 앞서 있는 노드가 문제가 발생했다는 것을 감지하고 문제의 카운터를 증가시키지 않음으로써, 앞선 노드만이 에러를 카운트하게 된다. 그렇게 되면 첫 번째 문제가 발생한 위치만이 표시되기 때문에, 정확하게 어디에 문제가 발생했는지 알 수가 있게 되는 것이다.
SubDevice에서는 각각의 포트마다 이런 진단정보들이 포함되어 있고, 헤더 카운터를 증가시키는 정보는 크게 두 가지가 있다.
첫 번째는 환경적인 요인으로 인해서 프레임에 문제가 발생할 경우 CRC 카운터가 증가하게 된다. 그리고 또 하나는 링크 자체가 떨어졌을 때, 통신이 두절된 상태일 때 관련 정보들의 링크 로스트 카운터가 증가하게 된다.
커미셔닝 단계에서도 이 기능들을 활용할 수 있다. 설치를 마치고 정상적으로 구동할 지 여부를 판단하기 위한 커미셔닝 단계에서 이 기능을 활용하게 되면, MainDevice에서 프레임을 보내서 특정 모듈 이웃단으로는 포트를 막아서 해당 모듈까지만 전달되도록 만들 수가 있다. 그리고 이 과정을 반복함으로써, 전체 노드의 개별적인 문제를 확인할 수 있는 기능으로 구현할 수 있다.
커미셔닝 단계에서 이 기능을 활용하게 되면 케이블 순서가 잘못됐다거나, SubDevice가 정확하게 동작하지 않는다거나, 케이블에 문제가 생겼다거나, 반복적인 발생하는 문제에 대해서 확인을 할 수 있다.
네트워크 내에서 진단정보를 활용하면 EMC 간섭을 확인할 수 있고, 상태 머신을 활용해서 SubDevice 자체에 문제가 발생하는 걸 확인할 수 있으며, 케이블이 끊어졌다든지, 잘못된 SubDevice가 사용됐다든지, 토폴로지가 잘못됐다든지 하는 다양한 유형의 오류를 판단할 수 있다. 이러한 정보들을 취합해서 컨피규레이션 툴 자체에서 쉽게 정보를 활용할 수 있다. 텍스트 기반이 불편할 경우, 그래픽 기반, 토폴로지 기반으로 된 진단정보를 활용할 수 있는 컨피규레이션도 있다,
5. EtherCAT G/G10. 밝은 미래를 위한 로드맵 - ETG Office Korea 김용성 차장

ETG Office Korea 김용성 차장이 EtherCAT G/G10을 주제로 발표를 하고 있다. @ EtherCAT Technology Group, Office Korea
EtherCAT은 가장 빠른 산업용 이더넷 통신이다. EtherCAT은 가장 빠른 필드버스이며, 특히 I/O, 센서, 드라이브 등을 구동하는 어플리케이션에 적합하다.
EtherCAT은 ‘On-the-Fly’라는 기본 원리를 사용한다.
EtherCAT이 있는데 왜 EtherCAT G와 EtherCAT G10이 필요할까?
EtherCAT이 가지고 있는 100Mb/s 이상의 대역폭을 요구하는 어플리케이션 사례들이 있기 때문이다.
샘플 비율 측정을 요구하는 오버 샘플링 어플리케이션 사례, 라이브 스트리밍을 포함한 비전 어플릴케이션 사례, 복잡한 모션 어플리케이션 사례, 많은 디바이스 장치와 짧은 사이클타임을 요구하는 거대한 어플리케이션 사례 등이 그 예다.
오늘날에는 EtherCAT이 가지고 있는 100Mb/s 이상의 대역폭을 요구하는 어플리케이션이 대단히 많다, I/O나 센서, 스마트 카메라의 경우에는 소수의 데이터만 생성하고 소비하게 된다. 그러나 그 이상을 요구하는 장치들은 EtherCAT G를 활용함으로써 대역폭을 넓힐 수 있고, EtherCAT이 가지고 있는 사용범위를 확장할 수 있다.
EtherCAT G와 EtherCAT G10도 EtherCAT이 가지고 있는 ‘On-the-Fly’라는 기능을 사용하는데, EtherCAT G와 EtherCAT G10은 1Gb/s에서 10 Gb/s까지 속도를 올릴 수 있다. 또한 EtherCAT G와 EtherCAT G10은 EtherCAT과 완벽하게 호환하여 사용할 수 있다. 또한 EtherCAT G와 EtherCAT G10도 이더넷 표준인 IEEE 802.3을 따르기 때문에 프레임을 변경하지 않아도 된다.
EtherCAT G를 사용하기 위해서는 별도의 소프트웨어가 필요하지 않다. MainDevice에서 별도의 소프트웨어가 필요하지 않고 1Gb/s의 이더넷 포트 하나만 있으면 사용이 가능하다. 커넥터는 RJ45 커넥터를 사용할 수 있고, IP67 등급의 인증이 필요할 경우에는 M12 x-coded를 연결하여 사용하면 된다. 케이블은 가장 많이 사용하고 있는 Cat.5e 케이블을 사용하면 되고 EtherCAT 10G를 요구할 경우 Cat.6a 또는 Cat.7을 사용하면 된다. 이때 사용 가능한 최대길이는 약 55미터다.
EtherCAT과 EtherCAT G는 완벽하게 호환하여 사용 가능하다. EtherCAT G SubDevice가 EtherCAT 100Mb/s 네트워크 환경에 도입하게 되면 EtherCAT SubDevice는 100Mb/s로 자동 변환된다. 즉, EtherCAT G SubDevice는 100b/s 네트워크 환경에서 EtherCAT 표준 SubDevice 역할을 하게 되는 것이다. 반대로 기가비트 네트워크 환경에서 100Mb/s SubDevice가 도입이 되면 EtherCAT SubDevice를 인식하는 동시에 전체 네트워크는 기가비트가 아닌 100Mb/s로 변환하게 된다.
EtherCAT G는 분기기능을 가지고 있는데, 이 분기기능은 크게 2가지 기능 원리를 제공한다. 첫 번째 EtherCAT Branch Controller(EBC)를 이용하여 100Mb/s 디바이스 장치들과 EtherCAT G/G10과 완벽하게 통합 호환하여 사용이 가능하다.
두 번째 세그먼트를 병렬로 구성하여 지연시간을 많이 단축시킬 수 있다. 기존에는 MainDevice에서 시작한 프로그래밍이 모든 디바이스 장치를 거쳐 다시 MainDevice로 돌아오지만, EBC를 사용하면 EBC에서 프레임을 세그먼트 별로 분리하여 구성하고, 세그먼트 100Mb/s일 경우에는 100Mb/s로 전환하여 전송하고 세그먼트에 있는 디바이스 장치들을 거쳐 다시 MainDevice로 돌아오기 때문에 지연시간을 많이 단축시킬 수 있다.
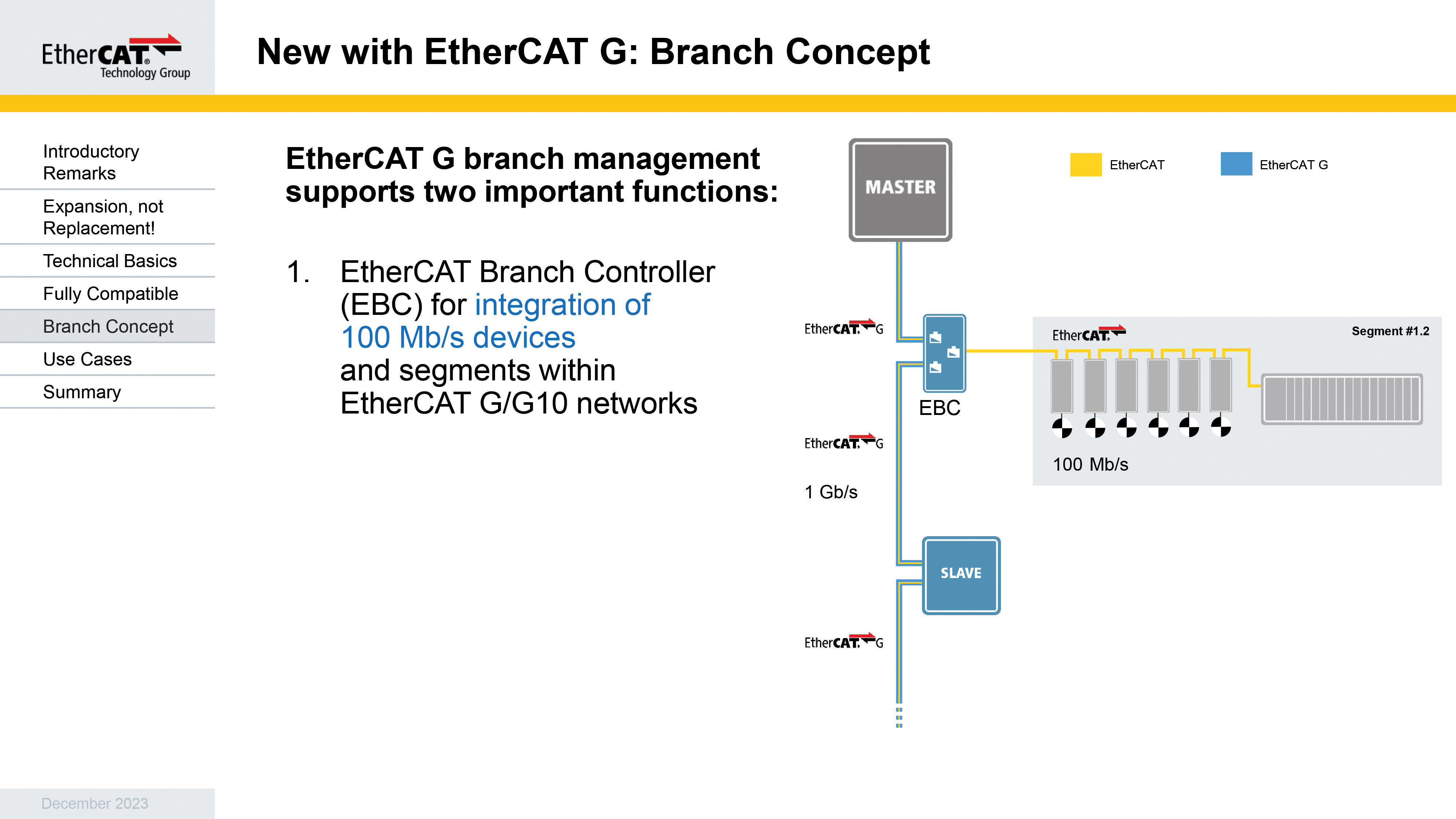
EtherCAT G의 새로운 기능: 브런치 개념. @ EtherCAT Technology Group
어플리케이션 내에서 EtherCAT Branch Controller(EBC)를 사용하게 되면 EtherCAT 1기가비트에서 10기가비트, 100Mb/s까지 기본 네트워크를 함께 사용할 수 있다.
EtherCAT G 적용사례
128개의 서보모터 축이 있는 거대한 네트워크에서 라인 토폴로지와 하나의 세그먼트를 구성하고, 드라이브 입출력 값을 8바이트로, 사이클 주기는 1024바이트로 세팅하고 EtherCAT 통신으로 실행을 하게 된다면 약 237μs의 시간이 소요된다.
하지만 똑같은 구성에서 EtherCAT에서 EtherCAT G로 기가비트를 변경하면 약 150μs의 시간이 소요된다. 프레임의 길이는 다소 짧아졌지만 전파 지연시간이 그대로 있기 때문에 속도가 많이 빨라졌다고 말하기는 어려워 보인다. 그러나 EBC를 사용해서 하위단을 8개의 세그먼트로 구성하고 EtherCAT 통신으로 실행하게 된다면 약 5배 빠른 49μs의 시간이 소요된다. 똑같은 구성에서 EtherCAT에서 EtherCAT G로 실행하게 되면 7배 빠른 34μs의 시간이 소요된다.
4가지의 접근 방식과 토폴로지를 비교해보면 토폴로지를 변경하지 않고 EtherCAT에서 EtherCAT G로 바꿔서 진행을 하면 속도가 많이 빨라지진 않지만, EBC를 사용해서 세그먼트를 병렬로 실행하게 된다면, 전파지연 시간이 줄어들고, 프레임의 길이가 짧아지기 때문에, 성능이 향상되는 것을 알 수 있다.
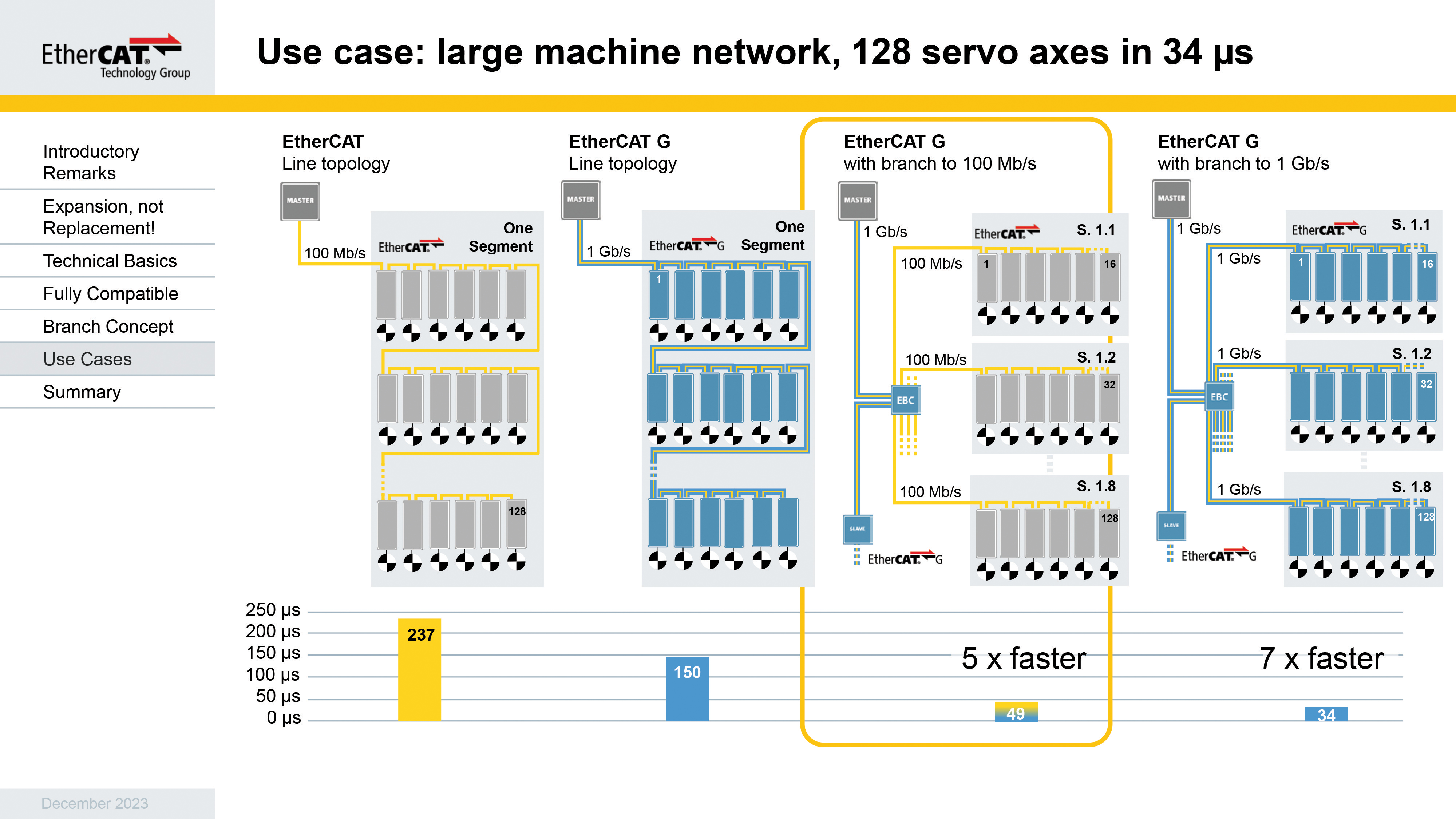
대규모 머신 네트워크, 34μs 내 128개 서보 축. EtherCAT Branch Controller(EBC)를 사용해서 세그먼트를 병렬로 실행하면 전파지연 시간이 줄어들고, 프레임의 길이가 짧아지기 때문에, 성능이 향상되는 것을 알 수 있다.@ EtherCAT Technology Group-12 PDF 17P 그림 사용
EtherCAT은 현존하는 가장 빠른 산업용 이더넷 통신이다. EtherCAT G는 새로운 버전의 EtherCAT이 아니다. 이것은 서드파티 장치들과 호환 가능한 기능 원리다. EBC를 사용하면 EtherCAT G와 EtherCAT G10 등 EtherCAT과 완벽하게 통합 호환하여 사용 가능하다. 세그먼트를 병렬로 구성하면 지연시간을 많이 단축할 수 있다. EtherCAT G는 EtherCAT을 대체하는 것이 아니다. EtherCAT이 가지고 있는 100Mb/s 이상의 대역폭을 요구하는 어플리케이션이 있다면 EtherCAT G를 사용함으로써, 대역폭을 확장해서 사용할 수 있고 문제를 해결할 수 있다.
6. 사용자가 EtherCAT을 활용하여 비즈니스를 성공시키는 방법 - ETG 본사 Martin Rostan 협회장
EtherCAT은 고객이 원하는 우위를 달성하기 위한 수단이다. EtherCAT의 목표는 고객이 업무를 잘하도록 하는 것이다.
왜 EtherCAT이 하이엔드 모션 컨트롤을 의미하나?
초기에 EtherCAT을 빨리 도입한 분야는 모션 제어 분야로, 쿠카(Kuka)는 초기부터 EtherCAT을 도입했다. 2005년부터 도입하기 시작해서, 2010년 이후 쿠카 로봇은 모두 EtherCAT으로 통신한다. ROS는 오픈소스의 운영체제로서 로봇의 알고리즘이 이미 내재가 되어 있다. EtherCAT MainDevice가 내장되어 있어서, 이 ROS는 네이티브한 EtherCAT MainDevice라고 볼 수 있다.
독일의 Franka Emika의 모든 로봇은 EtherCAT으로 구동한다. 애질리티(Agility Robotics)의 Digit 로봇 역시 EtherCAT으로 통신한다.
Syntegon 테크놀로지(fka 보쉬 패키징 테크놀로지)는 모션 기자재 일등 기업인데, EtherCAT을 사용하고 있다. 이탈리아 Tetra Pak 역시 EtherCAT을 적용해서 Cap Applicator에서 시간당 2만5천개의 캐핑작업을 실현해 속도를 40배나 높였다.
반도체 산업은 EtherCAT이 적용되어 있는 대표적인 산업군이다. Trumpf, Zeoss, ASML 사 등의 EUV Lithography에 EtherCAT이 적용되어 있다.
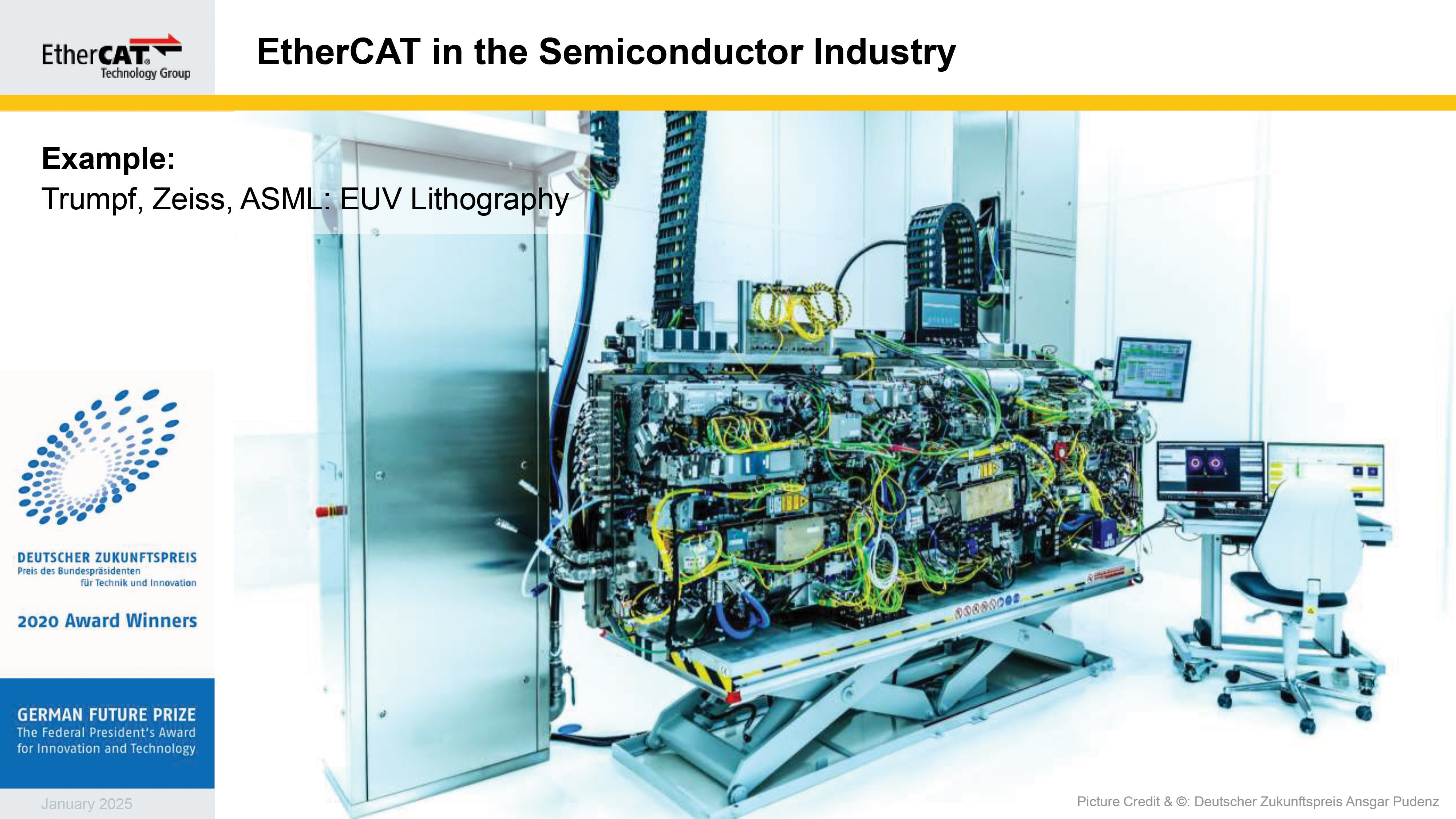
EUV Lithography. 사진의 노란 색 부분이 EtherCAT. @ EtherCAT Technology Group
반도체 장비 제조사의 탑10은 모두 ETG의 회원사이고, EtherCAT을 사용하고 있다. 한국의 삼성과 같은 반도체 칩 메이커는 EtherCAT을 반도체 장비에도 사용하도록 독려하고 있다.
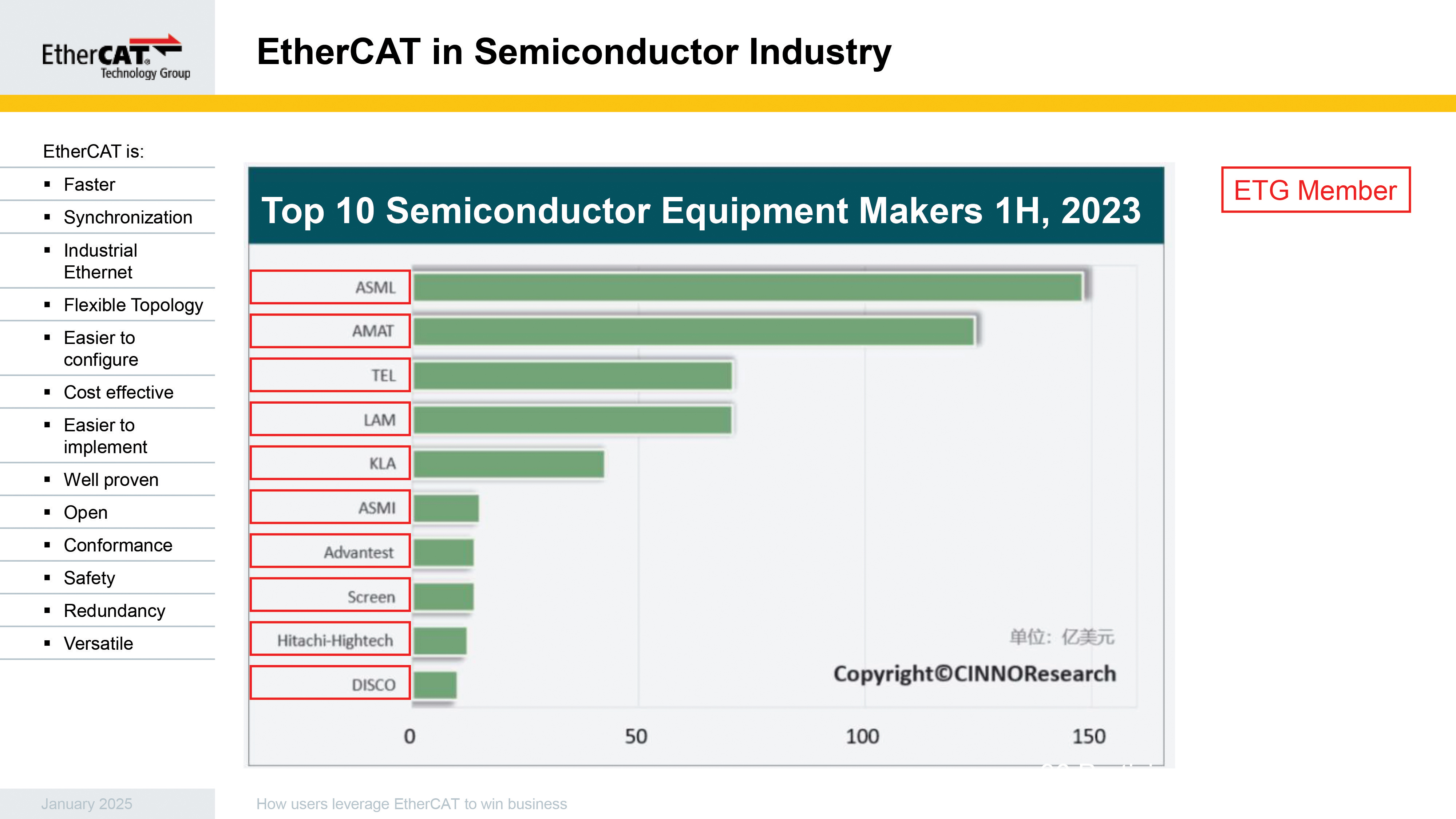
반도체 장비 제조사의 탑10은 모두 ETG의 회원사이고 EtherCAT을 사용하고 있다. @ EtherCAT Technology Group
공작기계와 기계 분야 역시 마찬가지다. 중국의 DR Laser Technology를 비롯해서 오스트리아 Penta-Tec, 중국 Harmuth and A&T 등이 EtherCAT을 사용하고 있다.
성능 + 지속성을 위해 사용된 사례가 많이 있다.
과학 분야에서는 칠레의 Giant Magellan Telescope이 3000축 이상의 FSoE를 적용하고 있다.
제어성능과 통신 시스템을 위해 EtherCAT을 적용한 사례도 흔하다. 플라스틱 산업에서 캐나다 Husky가 HyPAC Injection Modeling Machine에 EtherCAT을 사용하고 있다.
성능과 정확도를 위한 사례로는 식품 분야의 덴마크 Borncut A/S가 있다.
성능을 위한 사례로는 금속성형 분야의 스위스 Hausler AG 등이 있다.
석유 시추 진동분석을 위해 EtherCAT이 사용된 사례도 있다. Tianjin Aoling Industrial Automation Technologies(Aoling)for CNOOC가 그 예다.
토폴로지+성능을 위한 사례로는 용접자동화 시스템에서 미국 텍사스의 ARC Specialities사가 있다.
EtherCAT은 사용이 쉽다. 미국의 ICS, CA는 펌프 최적화를 위한 CarBuil 제어 시스템에 펌프 최적화를 위한 CarBuil 제어 시스템에 EtherCAT을 사용하고 있다.
Functional Safety 사례도 많이 있다. Tire Testing System 등이 그 예다.
EtherCAT을 선택하면 많은 장점을 얻을 수 있다.
높은 성능은 높은 정밀도로 이어지며, 처리량, 효율성에서도 이점을 얻을 수 있다. 다양한 공급업체와 낮은 비용으로 인해 가격적인 경쟁력도 얻을 수 있으며, 진단 기능, 원격 유지 관리, 고가용성 옵션 등을 통해 높은 가용성을 얻을 수 있다. 또 EtherCAT을 통해 장치를 안전하게 사용할 수 있고, 유연한 토폴로지 및 필드버스 게이트웨이로 인해 확장성을 얻을 수 있다. 또한 EtherCAT은 산업용 이더넷이기 때문에 통합이 용이하고, EtherCAT은 전 세계적으로 보급되어 있어 글로벌 서비스를 지원받을 수 있다. 특히 EtherCAT은 버전이 하나뿐이기 때문에 안정성이 뛰어나다.
Ⅱ. 회원사 발표
1. ADLINK – SuperCAT 성공사례 - ADLINK Technology Korea 최재호 부장

ADLINK Technology Korea 최재호 부장이 ADLINK – SuperCAT 성공사례를 주제로 발표를 하고 있다. @ EtherCAT Technology Group, Office Korea
ADLINK는 PC 베이스 솔루션을 제공하는 회사로, 20년 전부터 모션 컨트롤을 포함해서 I/O 및 PC 관련 솔루션을 지속적으로 제공하고 있다. 최근에는 EtherCAT을 기반으로 한 솔루션을 제공하고 있고, 얼마 전까지는 PCI 보드 타입의 EtherCAT을 제공했고, 최근 들어서는 SuperCAT이라는 이름으로 소프트웨어 타입의 모션 솔루션을 제공하고 있다.
최 부장은 ADLINK가 왜 EtherCAT을 선택했는지, 그중에서 소프트웨어 타입의 EtherCAT을 선택했는지 그 이유를 성공사례를 통해 설명했다.
첫 번째 사례는 국내 모 회사에서 Die Transfer를 제작하는 프로젝트였는데, 기존 고객이 사용하는 장비는 펄스타입 장비와 다른 브랜드의 통신 타입, 비전, 이 세 가지를 각기 다른 시스템으로 사용을 하고 있었다. 그래서 ADLINK의 제품을 사용해서 EtherCAT을 통해 하나의 통합된 시스템, 안정화된 시스템을 제공하는 것을 목적으로, 그리고 작은 사이즈의 시스템을 제공하는 목적으로 SuperCAT과 EtherCAT 관련된 제품을 제공한 성공사례다.
하나의 IPC와 EtherCAT을 사용하기 위한 수퍼캣(소프트웨어 타입의 모션 제품으로 별도의 하드웨어가 필요없다), 그리고 비전을 이한 POE 카드를 통해서 비전을 사용하는 솔루션을 제공했다. 이 케이스는 특히나 시간단축을 위해서 Flying Vision을 요구했고, 이전에는 없던 시스템이었지만 그것을 위해 EtherCAT 모듈 중에 트리거(Trigger) 기능이 있는 모듈을 사용해서 구동 중에 비전을 촬영하고, 검사할 수 있는 솔루션을 함께 통합해서 제공했다.
EtherCAT을 통합하면서 전체적으로 시스템이 간소화가 됐다. 이전에는 3개의 각기 다른 시스템이 연동되다 보니까, 연동하는 지연시간 때문에 전체적인 사이클 타임이 늦어진 반면에, 통합 EtherCAT 솔루션을 사용하면서 시간이 단축됐고, POE 카드를 꽂아서 올인원 PC로 공급한 것도 이점이다. 그리고 케이블에 대한 비용을 절감할 수 있었다. 또, 갠트리 시스템도 간단하게 구성해서 EtherCAT으로 구성했다는 점이 이 프로젝트의 가장 큰 이점이다.
이외에도 ADLINK가 왜 소프트타입의 모션 컨트롤러 수퍼캣을 선택했는지 보여주는 사례들이 소개됐다. 소프트웨어 타입의 모션 컨트롤러는 125마이크로세크의 제어주기, 128축까지 제어할 수 있는 능력, RTOS 안에서 태스크를 구성해서 리얼타임으로 어플리케이션을 구성할 수 있다는 장점을 갖는다. 특히 사용자들의 “소프트웨어 타입은 불안하지 않은가?”라는 우려를 해소시키고자 IPC 플랫폼도 다양하게(팬리스 컴퓨터라든가 임베디드, 인더스트리얼 PC까지) 같이 제공을 함으로써, 호환성과 안정성 모두를 한 번에 제공할 수 있다는 메리트를 제공했다.
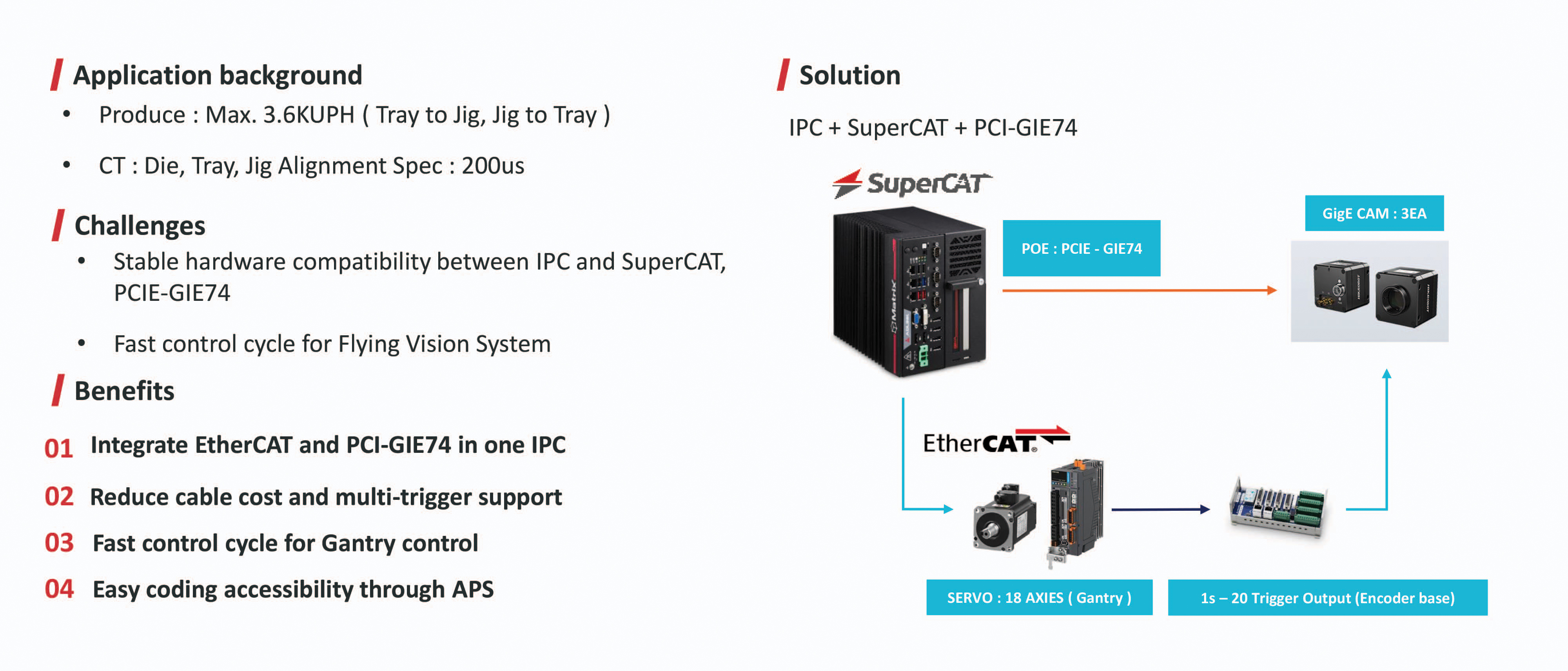
ADLINK의 SuperCAT을 적용한 Die Transfer 프로젝트 성공사례. @ ADLINK Technology Korea
2. 다축 EtherCAT 어플리케이션에서의 Copley Controls 솔루션 - Copley Controls의 Zhao Dean

Copley Controls의 Zhao Dean 씨가 다축 EtherCAT 어플리케이션에서의 Copley Controls 솔루션을 주제로 발표를 하고 있다. @ EtherCAT Technology Group, Office Korea
Copley Controls는 1984년 MIT 출신들이 창업한 회사로, 본사는 미국에 위치하고 있고, 연구개발은 미국 캔턴(Canton)에서 하고 있다. 제조는 중국 상해에서 하고 있으며, 북미, 유럽, 아시아에 걸쳐 판매 및 지원 네트워크를 구축 운영하고 있다. 각 지역의 각종 사무소가 판매 네트워크를 바탕으로 서비스를 제공하고 있다.
Copley는 모션제어 엔지니어링, 어플리케이션 관련 유수의 경험을 보유하고 있다. EtherCAT을 비롯한 이더넷 기반의 IP 필드버스 관련 여러 가지 기술지원 경험. 특허받은 고성능 서보 컨트롤 루프 등을 갖고 있기 때문에 독립적인 솔루션을 제공할 수 있고, 최고의 성능을 어떠 어플리케이션에서도 제공할 수 있다. 그 외에도 다축 드라이브 서보와 스테퍼, 교차결합 및 슬리브 모드 기능을 제공하고 있다. 인증된 STO 및 진단형 CPU를 제공하고 있다. 뿐만 아니라 직관적인 구성 툴들을 제공하고 있기 때문에, 고객사들이 튜닝이나 진단 등을 수월하게 할 수 있다. 만약 고객사에서 맞춤형 디바이스를 원하면 분산형 모션 제어 소스코드를 제공함으로써, 본인들이 원하는 솔루션을 만들 수 있도록 지원하고 있다. EtherCAT은 고객사에서 인기가 많다. 현장에는 100만개 이상의 드라이버가 설치되고 있는데, Beckhoff, 오므론 외 고정밀의 동기화된 기능들이 가능하기 때문에 현장에서 EtherCAT을 널리 사용하고 있다.
고객의 요구에 따른 수요를 충족하기 위해서 클래시컬 DSP, FPGA, 스탠다드 암(Standard ARM) 등을 바탕으로 한 아키텍처를 제공하고 있다. 그리고 AC와 DC 전원 디지털 드라이브를 제공하고 있다. 만약 소형이나 고출력을 원할 경우, 나노 NES, NPS, NPP 등이 있고, 다방면의 인풋 파워 하이 커런트를 원할 경우 GEM, AEV 등도 가능하다. 그리고 둥근형의 드라이브를 원할 경우에는 IES/IPS가 가능하고, 서보와 스테퍼에서의 다방면의 기술을 가지고 있기 때문에, XEC, XE2와 같은 드라이브도 지원을 하고 있다. 뿐만 아니라 사각형으로 되어있는 드라이버도 제공을 하고 있다. 그래서 척박한 환경에서도 활용을 할 수 있다. 영하 40도에서 70도까지의 온도를 견딜 수 있는 드라이브가 있다. 고도 400미터에서 6만미터까지 커버가 가능한 드라이브도 제공하고 있다. 뿐만 아니라 EtherCAT I/O 모듈을 통해서 다른 I/O 입출력과 연결할 수 있는 장치들도 제공을 한다.
Copley가 제공하고 있는 대부분의 드라이브의 경우에는 직관적인 소프트웨어 옵션까지 제공을 하고 있다. 그래서 튜닝이나 진단을 수월하게 할 수 있다. 만약 고객사 중에서 본인들만의 MainDevice 솔루션을 원하면 소스코드 라이브러리, 모션 라이브러리를 제공함으로써, 고객사들이 본인이 원하는, 또 EtherCAT과 호환 가능한 솔루션을 제공할 수 있도록 도움을 주고 있다.
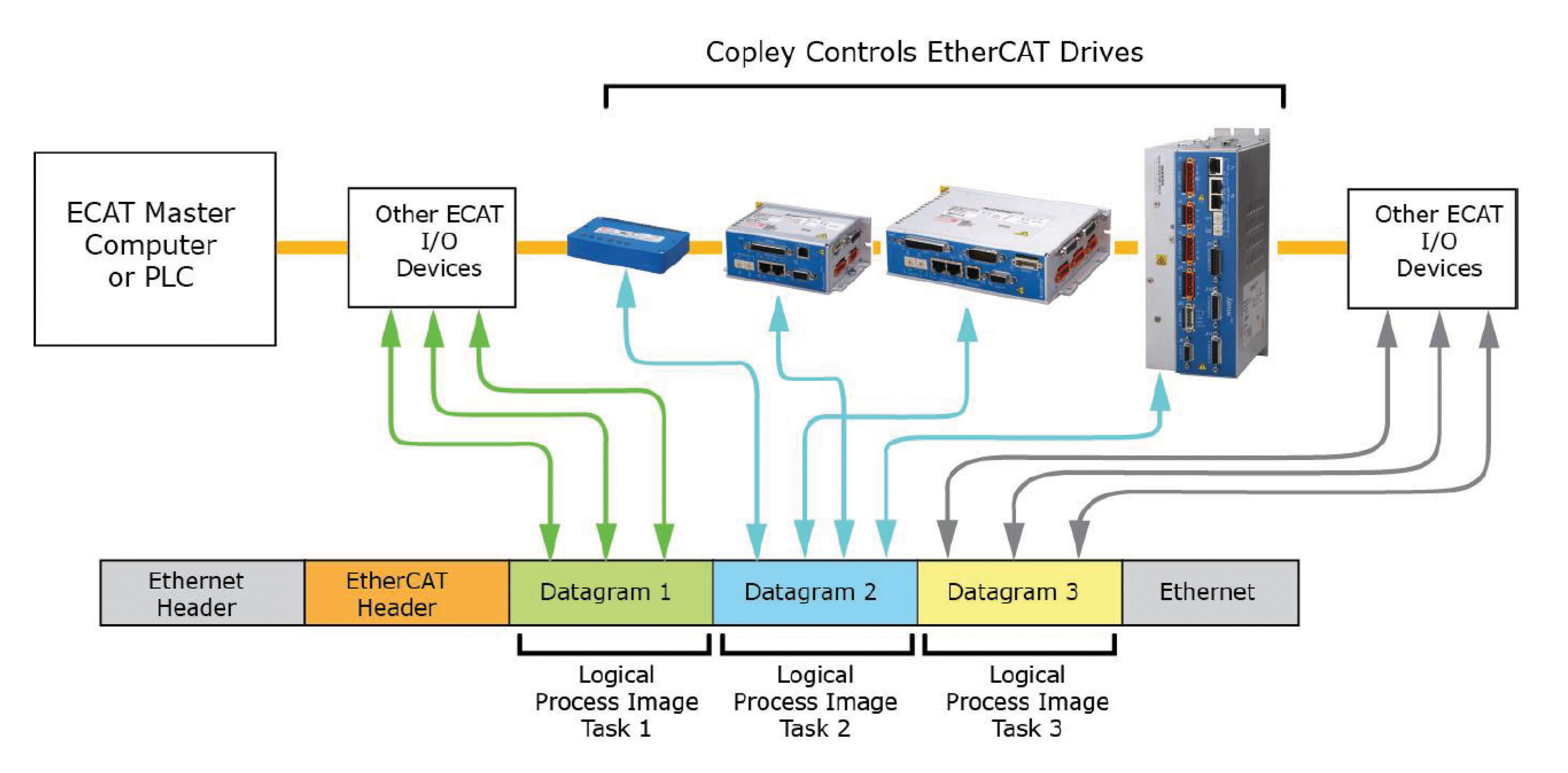
전형적인 EtherCAT 시스템 도면. Copley EtherCAT Drives. @ Copley Controls
EtherCAT과 CANopen 비교
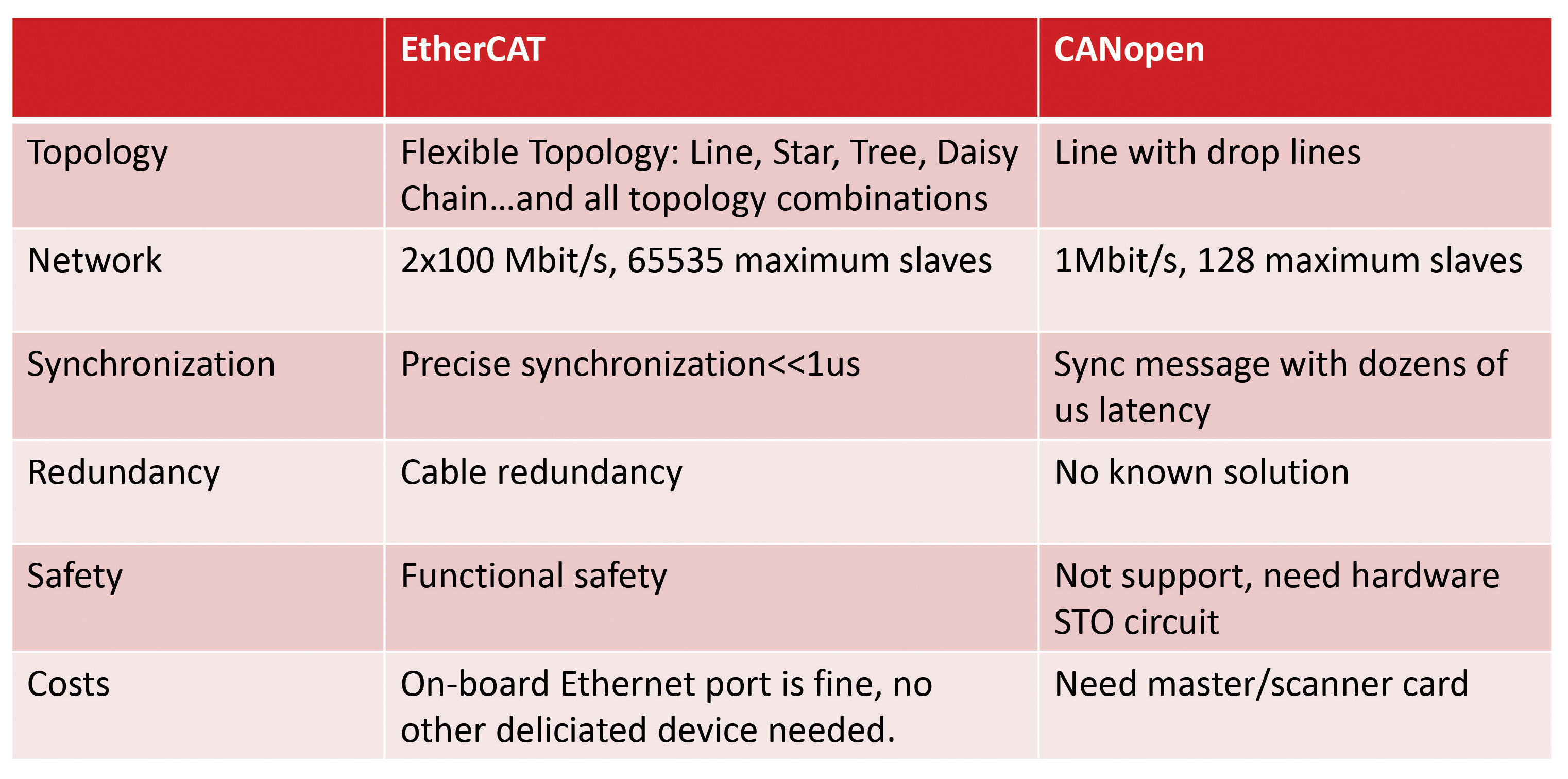
EtherCAT과 CANopen의 비교. @ Copley Controls
EtherCAT은 유연한 토폴로지, 동기화 관련된 특장점, 이중화나 안전성, 비용적인 면에서 훨씬 많은 장점들이 있다. 그래서 많은 고객사들이 EtherCAT 쪽을 선호하고 있는 것이 사실이다.
Copley에서 제공하고 있는 2가지 핵심 솔루션이 소개됐다. 첫 번째로, Copley는 다축 드라이브를 제공하고 있는데, 여기에는 여러 가지 선진기술들이 탑재되어 있다. 예를 들어 MainDevice SubDevice 동기화라든지, 교차결합, 갠트리 알고리즘 등 특수한 다축기능을 구현할 수 있다. 2축, 3축, 4축 드라이브 등을 제공하고 있다. 여기에 고도의 기능과 기술들이 탑재되어 있는데, 사용하는데 있어서는 엄청난 효율성과 사용의 용이성을 제공하고 있다.
그뿐만 아니라 C++ 소스코드 라이브러리도 제공하고 있다. 이것을 바탕으로 고객사들이 본인들이 원하는 MainDevice를 만들 수 있다. 그리고 기본적으로 최대 32축 다축 연동 이동을 지원을 하고, 쉽게 조정된 모션 실현을 가능케 한다. 더불어서 ROS와 ROS2도 전방위로 지원을 하고 있다. 그래서 연속 가속 알고리즘을 통해서 상당히 유연한 모션을 생성할 수 있고, 효율적인 모션 프로파일이 가능하다.
반도체 분야에서 웨이퍼 로봇의 웨이퍼 스핀들에서 사용된 사례가 소개됐다. 고속 포지션 캡처 기능과 고정밀의 포지션 트리거 기능이 있어서, 고정밀 모션 제어가 가능하다. 그리고 그 외에도 고정밀을 위해서 엔코더도 제공하고 있다.
3. 실시간 EtherCAT 자동화를 위한 86Duino IDE와 간편한 LVGL 도구 - ICOP Technology의 Joe Chen

ICOP Technology의 Joe Chen씨가 실시간 EtherCAT 자동화를 위한 86Duino IDE와 간편한 LVGL 도구를 주제로 발표를 하고 있다. @ EtherCAT Technology Group, Office Korea
ICOP Technology는 대만에 위치해 있고, 1999년부터 IPC 디바이스를 제조해왔다. 산업용 컴퓨터, 판넬PC, EtherCAT 솔루션 등을 제조해왔다. 미국, 멕시코, 독일, 일본, 중국 등에 사무소를 운영하고 있고, 본사는 대만에 있다. 모든 제품은 대만에서 생산되고 있다.
첫 번째로 ICOP은 전 세계적으로 EtherCAT MainDevice, SubDevice 모터 드라이브 등을 생산하고 있다. EtherCAT 어플리케이션들이 다양한 어플리케이션을 위해서 사용이 되고 있고, 정밀한 로봇 어플리케이션을 위해서도 사용이 되고 있는데, EtherCAT을 사용자 입장에서 여러 산업에 적용할 수 있도록 하고자 한다.
어떻게 EtherCAT을 모두를 위해 사용할 수 있도록 만들 수 있을까? 우선 EtherCAT은 세계 최고의 필드버스다. 성능이 높고 케이블 숫자는 더 적고 실시간이 가능하다. 굉장히 많은 장점이 있다.
두 번째는 86Duino다. 이것은 ICOP이 제공하는 오픈소스 개발 소프트웨어로서, EtherCAT 솔루션을 개발하기 위한 것이다.
세 번째는 현재 2024년, 2025년 가장 인기 있는 주제인 Chat AI이다. Chat AI를 사용할 수 있는 것은 86Duino가 오픈소스이기 때문이다. AI가 86Duino를 아주 빠르게 배울 수 있기 때문이다.
이 세 가지가 결합이 돼서 모두를 위한 EtherCAT이 탄생하기를 기대하고 있다.
모두를 위한 EtherCAT. @ ICOP Technology
Duino라고 하면 Arduino(아듀이노)가 먼저 생각날 것이다. 사용자 친화적이고 튜토리얼이 포함이 되어 있고, C++ 프로그래밍 언어를 사용한다. 그런데 사용자들이 계속 질문을 한다. 아듀이노를 산업 어플리케이션에 사용을 한다고? 그래서 86Duino를 만들었다. 이것은 산업용 소프트웨어 개발로서 EtherCAT 라이브러리와 canvas 라이브러리 등 다양한 산업 커뮤니케이션 라이브러리, MySQL 라이브러리를 지원하고 있다.
86Duino의 장점을 보면, Duino를 하드웨어 안에서 구동하지 않고, 스크립트를 코딩할 때 산업용 OS와 함께 코딩해서 실시간으로 운영을 하고 있다.
다음은 하드웨어 QEC MainDevice다. ICOP의 MainDevice로서, 이 디바이스 안에는 Vortex86ex2가 있다. 이것이 직접 제조를 하고 있다. 포트가 2개 들어간 CPU다. 듀얼코어가 아니라 코어가 2개다. 하나의 패키지 안에 코어를 두 개 담았다. 그래서 마스터가 있고 슬레이브가 있다. 마스터는 EtherCAT MainDevice 라이브러리 역할을 하고 있고, 유저 어플리케이션을 제공하고 유저 인터페이스 디스플레이를 제공한다. 두 번째 CPU는 슬레이브 CPU라고 부르고 있는데 EtherCAT MainDevice 코어를 담당하고 있고, 또한 EtherCAT을 통해서 SubDevice 간에 소통을 하게 된다. 2개의 CPU가 있어서 이것을 가지고 IO 가상화 인터페이스를 사용하고 있고, 2개의 CPU 간에 나노세크 단위로 통신이 가능해서 실시간 통신이 가능해진다.
다시 소프트웨어에 대한 설명이다.
첫 번째, 그래픽 툴을 로코드 디벨롭먼트 툴로 제공을 하고 있는데 86EVA를 우선 지원을 하고 있다. 컨피규레이터로서 모든 하드웨어의 컨피규레이션을 가능하게 해준다. ICOP SubDevice를 지원할 뿐 아니라 다양한 종류의 타사 디바이스(미쓰비시나 파스텍 등을 지원하고 있다)를 통해서 고객사가 컨피규레이션을 간소화할 수 있도록 돕고 있다. 두 번째로는 HMI 리소스가 들어간다. 드롭패드처럼 인터페이스를 그릴 수 있고, 이미지를 추가할 수 있고, 드롭패드를 통해서 유저 인터페이스를 디자인할 수 있다. 세 번째는 ArduBlock이다. ArduBlock을 사용해서 고객들에게 드래그 앤 드롭 블록(Drag-and-Drop the Block)을 사용해서 코딩을 할 수 있도록 돕기 때문에 디자인 과정을 간소화할 수 있다. HMI 리소스를 계속 추가하고 있다. 왜냐면 유저 인터페이스를 디자인하는 것이 대단히 어렵기 때문이다. 따라서 HMI 에디터를 추가함으로써, LVGL 라이브러리를 지원하고, 이 툴을 통해서 UI를 디자인하도록 하고 있다.
AI는 똑똑한 것이 아니고 빠르게 배울 뿐이다. 따라서 고객사를 위해서 AI 트레이닝을 제공하고 있다.
86EVA를 사용하는데 단순히 컨피규레이션만 하는 것이 아니고, 코드를 만든 다음에 ChatGPT 헤드파일을 만들어서 ChatGPT에게 우리의 코드에 대한 소개를 한다. 그리고 ChatGPT 헤드파일을 카피해서 프롬프트를 만들게 된다. 그러면 엔지니어를 위한 코드를 가지고 컴파일러에 입력을 해서 모든 것이 끝나게 된다.
86EVA를 사용해서 MainDevice를 통해 기본적인 세팅을 하고 디지털 I/O를 만들고 게이트웨이도 만들고 스텝모터 컨트롤러도 컨피규레이션을 하게 된다.
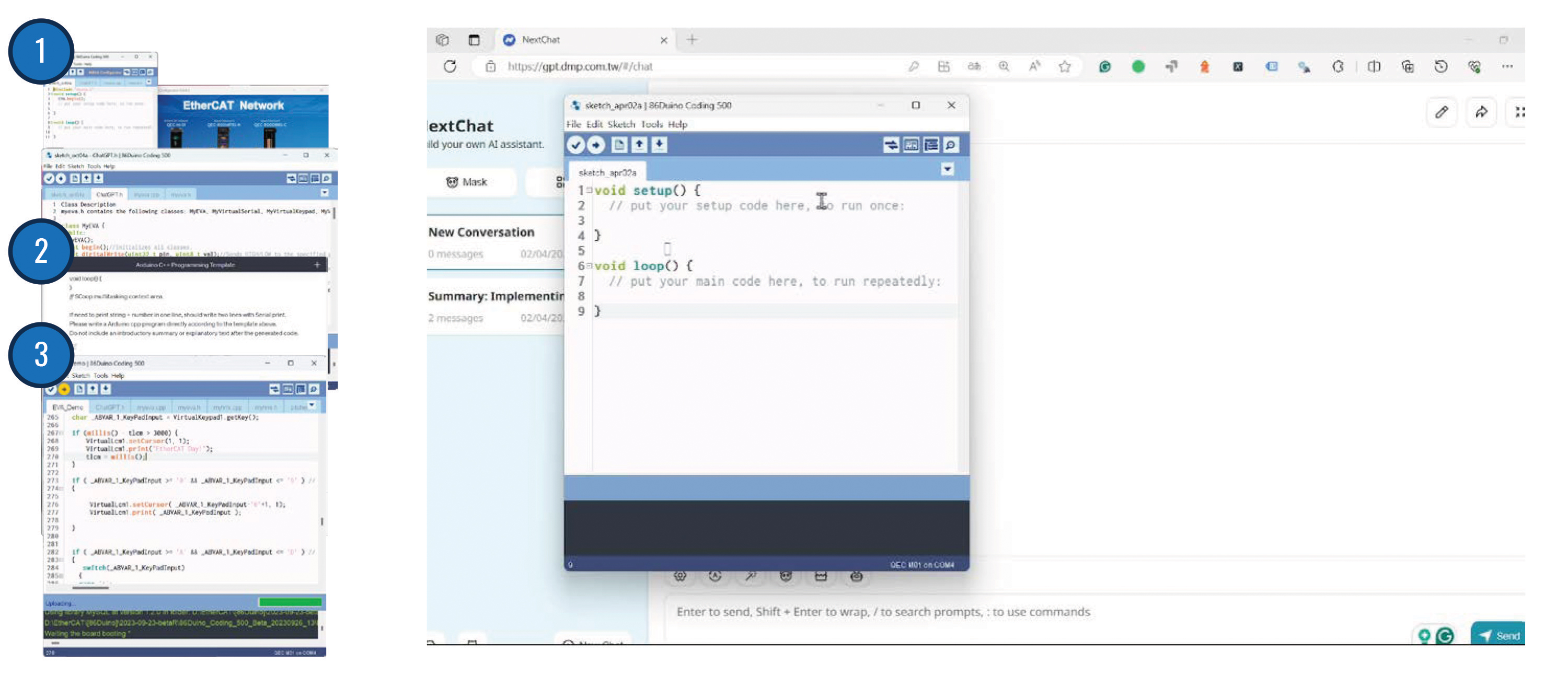
EtherCAT with AI/ChatGPT. @ ICOP Technology
ChatGPT의 헤드파일이 나오고 이것을 다시 ChatGPT에 입력을 하게 되고, 프롬프트를 제공을 하게 된다. 예를 들어서 시리얼 포트를 설정하고 EtherCAT을 사용해서 컨트롤을 하기도 한다. AGV에 대한 디스플레이도 통제를 하게 되고, 여러 가지 프롬프트를 포함하게 된다. 간단한 프롬프트는 미리 제공을 하기 때문에 고객사 입장에서는 간단하게 프롬프트를 사용할 수 있게 된다. 프롬프트가 끝나면 ChatGPT로 보내게 된다. 엔지니어링에 대한 코딩이 이루어지는데 이 과정은 지루한 과정이다. AI를 사용해서 엔지니어링을 대체하는 것은 아니다. 절대 엔지니어를 대체하고자 하는 것은 아니다. AI의 목적은 편하게 만드는 것이다. 엔지니어들이 지루한 과정을 편하게 하고 오히려 아이디어를 내는데 집중할 수 있도록 돕는 것이다. 이렇게 끝나게 되면 다시 컴파일러에 업로드하게 되고 MainDevice로 업로드를 하게 된다. MainDevice도 있고 컴포트도 있고, LCDMO 모터 컨트롤도 있다. 모든 것이 다 구동이 되고 있다. 결국은 AI를 통해서 할 수 있는데, 아이디어를 AI가 내주는 것이 아니고 코딩만 해준다.
ICOP은 단순히 MainDevice만 제공하는 것이 아니고, SubDevice들도 제공하고 있다.
가장 중요한 것은 디자인과 소프트웨어다. 오픈소스를 사용하고 있어서 코딩하는데 용이하다. 예술 어플리케이션도 EtherCAT으로 연결할 수 있다. 인피니티 리플렉터 장치(Infinity Reflector Device)로서 모터 거울 빛을 사용해서 무한하게 빛을 고를 수 있는 형태를 만들었다. 이외에도 방전가공 어플리케이션에서 MainDevice를 사용해서 타사 서보모터를 제어할 수 있다. 미쓰비시, 델타를 제어할 수 있고, G코드도 마찬가지다. 그리고 기계 안의 모든 정보를 수집하게 된다. 이 정보가 수집된 다음에는 TCP/IP를 통해서 서보로 보내게 된다. 그렇게 되면 엔지니어가 직접 정보를 확인할 수 있게 된다. 원격으로 확인하게 되는 것이다,
3. FASTECH 회사 개요, EtherCAT 호환제품 및 어플리케이션 사례 소개 - FASTECH 석종원 과장

FASTECH 석종원 과장이 EtherCAT 호환제품 및 어플리케이션 사례에 대해 소개하고 있다. @ EtherCAT Technology Group, Office Korea
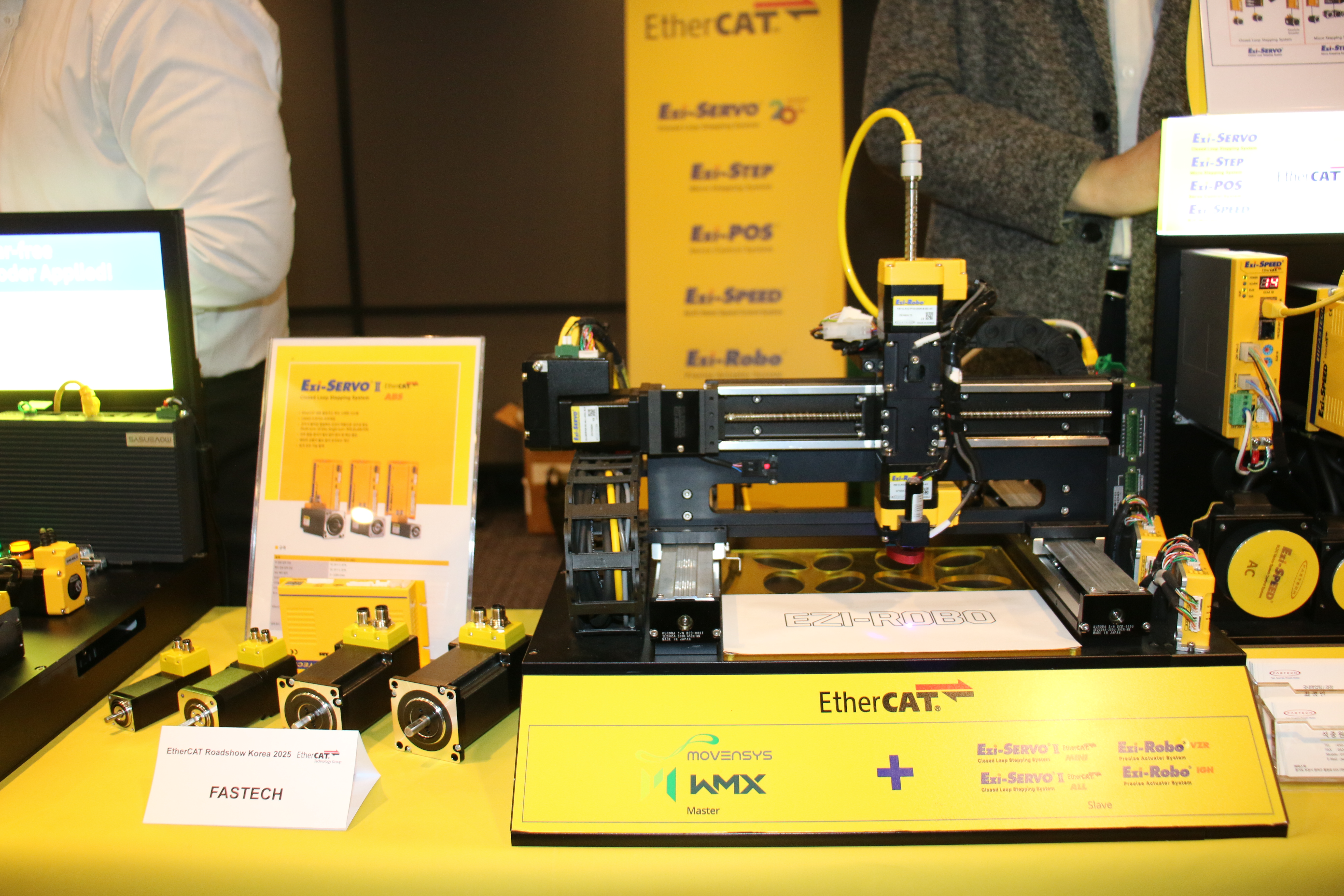
FASTECH은 모션 컨트롤러 전문 회사로서 SubDevice를 제작한다. FASTECH은 2001년 설립되어, 올해로 23년 차를 맞았다. 연평균 매출은 약 200억원으로, FASTECH의 비전은 개방형·표준화된 필드 네트워크 호환제품을 통해서 스마트 팩토리 구현에 기여하는 것이다. 그 예로 개방형 표준 네트워크인 EtherCAT을 통해서 스마트 팩토리 구현에 주력하고 있다. 제조시설을 위한 모션 컨트롤러 토탈 솔루션을 제공하는 것도 비전이다.
클로즈드 루프 스테핑 시스템 시장에서 Ezi-SERVO라는 브랜드로 한국시장 점유율 1위를 확보하고 있다.
EtherCAT 호환제품은 2014년부터 시작해서 EtherCAT 출시 이후 꾸준히 증가해왔고, 2022년에는 약 1만8천대, 현재는 2만대 정도를 판매하고 있다.
FASTECH 제품 라인업에는 Closed Loop Stepping System -Ezi-SERVOII EtherCAT(클로즈드 루프 스테핑 시스템), Micro Stepping System-Ezi-STEPII EtherCAT(마이크로스테핑 시스템), Motor + Encoder + Drive + EtherCAT Integrated type-Ezi-SERVOII EtherCAT ALL(모터 + 드라이브 + 고분해능 인코더 + EtherCAT 네트워크 일체형 타입), 콤팩트한 4축 드라이브-Ezi-SERVOII EtherCAT 4X(소형 다축 드라이브), 콤팩트한 미니 드라이브 Ezi-SERVOII EtherCAT Mini, 디지털 인풋 아웃풋 모듈/아날로그 입력/출력 모듈, 카운터 모듈-Ezi-IO EtherCAT DIO(디지털 입출력 모듈)가 포함되어 있다.
FASTECH은 토탈 솔루션을 지향한다. 제조설비를 만들기 위해서는 상위 마스터뿐만 아니라 스텝, AC서보, 디지털 입출력 모듈, 속도제어를 위한 BLDC 모터 속도제어 시스템, 저전압 서보 제어 시스템, 표준 액추에이터 등 여러 솔루션들이 필요한데, FASTECH은 기본적으로 모든 솔루션을 EtherCAT 네트워크를 통해서 제공하는 것을 목표로 하고 있다.
FASTECH은 스마트 팩토리 구현을 위해서 다양한 EtherCAT 호환제품을 보유하고 있다. 5개 브랜드 10가지 이상의 제품이 출시되어 있다.
클로즈드 루프 스테핑 시스템인 Ezi-Servo, 엔코더가 없는 마이크로 스테핑 시스템인 Ezi-STEP, DC 입력 BLDC 모터 속도 제어시스템인 Ezi-Speed, 저전압 서보 컨트롤 Ezi-POS, 디지털 입출력 모듈인 Ezi-IO, 아날로그 입력 아날로그 출력도 나와 있다.
Ezi-SERVO 제품군에서 배터리리스 앱솔루트 인코더와 마이크로 스테핑 시스템 군에서 STO 기능이 탑재되어있는 Ezi-STEPII EtherCAT TO, AC 입력 BLDC 모터 속도제어 시스템 Ezi-Speed EtherCAT AC가 올해 상반기에 출시될 예정이다.
FASTECH 제품은 산업 전반에 걸쳐 적용되어 있는데, 크게 반도체 관련 장비, LCD/OLED 관련 장비, 휴대 전화 검사 장비, 표준화된 정밀 소형 액추에이터(Suruga Seiki, KOHZU)의 4개 산업군으로 구분한다.
반도체 관련 장비에는 FASTECH 스텝 서보(클로즈드 루프 시스템)가 있어서 웨이퍼 이송축을 담당했고, LCD/OLED 관련 장비에는 기존 검사 스테이지 등에 적용이 됐다.
4. EtherCAT 기반 동기화 데이터 수집 및 시스템 진동분석 솔루션 - PRESTO SOLUTION 윤영구 수석

PRESTO SOLUTION 윤영구 수석이 발표를 하고 있다. @ EtherCAT Technology Group, Office Korea
EtherCAT 기반 동기화 데이터수집 및 시스템 진동분석 솔루션을 하게 된 계기는 5가지다. 현장에서 가장 많이 받는 질문은 첫 번째가 생산흐름 과정의 데이터를 측정하는 부분, 측정 데이터를 진단하는 방법, 두 번째 환경적인 부분과 결과물에 대해 어떻게 데이터를 측정하고 구성할 것인가, 세 번째 고속 실시간 데이터와 데이터 동기화를 어떻게 할 것인가, 네 번째 수집한 데이터를 어떻게 분석할 것인가, 다섯 번째 모션에 의해 생기는 진동, 진동을 기준으로 다양한 신호들을 하나의 솔루션으로 통합하는 방법이다.
이를 위해서는 과정 분석과 결과 진단, 결과물의 통합 데이터를 기반 분석, 실시간 데이터 통신과 데이터 동기화, 데이터 수집 및 분석 프로그램, 진동, 디지털 입출력 그리고 다양한 신호를 하나로 통합하는 솔루션이 필요하다.
모션이 움직이는 패턴을 기준으로 많은 데이터들을 동기화해보려고 했다. 제일 첫 번째에는 EC-Inspecter가 있고, 끝단에는 시뮬레이션하는 SubDevice가 있다.
왜 이걸 하게 됐나 설명하면, 실제로는 장비를 개발할 때 공정을 최적화하기 위해서 시간을 할애하고 최적화가 되고 나면 실제로 공정 프로세스에 들어가고, 결국은 UPH(유닛/시간)를 단축하기 위해 어떻게 할 것인가 하는 문제인데, 이것을 분석하는 과정과 결과를 진단하는 부분의 두 가지로 구분했다.
분석하는 과정 중에 많은 레시피 중에 특정구간에 대해 분석을 하고 싶은 요구가 생긴다. 그럴 경우, 모션과 진동 데이터를 합쳐서 분석을 하고, 모션에 대해서는 많은 데이터를 볼 수 있다. 거기에 진동 데이터를 더해서 보게 되면 좀 더 분석하는데 유리하다. 또는 모션이 움직였을 때 유저의 밴드 임펙트에 발생하는 진동을 같이 보고 싶을 때 그럴 경우 데이터 동기화가 필수다.
다음은 최적화된 현장에서 제품을 생산하는 과정에서 데이터를 로깅을 해야 한다. 데이터 로깅은 많은 호스트PC에 많은 업체들의 소프트웨어가 복합적으로 설치가 되어 있다. 각각의 소프트웨어에서 각각의 데이터를 보려고 하면 많은 시간이 소요되고, 하다가 포기를 하게 된다. 하나의 레퍼런스가 없기 때문이다. 시간적 기준으로 모든 데이터를 정렬하겠다는 것이 목표이기 때문에, 그렇게 되면 1키로헤르츠 실시간 통신으로 데이터를 취합하고, 취합된 데이터를 양산했을 때 디펙트가 나오는 시간대에 데이터를 열어서 모션 프로파일, 모션 기준으로 남은 데이터를 보게 되면 데이터를 좀 더 효율적으로 사용할 수 있다,
지금은 EtherCAT 제일 끝단에 데이터를 수집하는 SCAT-D라는 모듈을 설치하고, SCAT-D에서 데이터를 수집하게 되면 로깅도 되고, 로깅된 것을 기억을 하기 때문에, 레시피를 최적화하는 과정에서는 고해상도로 보고, 양산이 진행되는 과정에서는 시간 주기 분 단위로 1키로헤르츠로 로깅된 데이터를 가지고 분석을 한다.
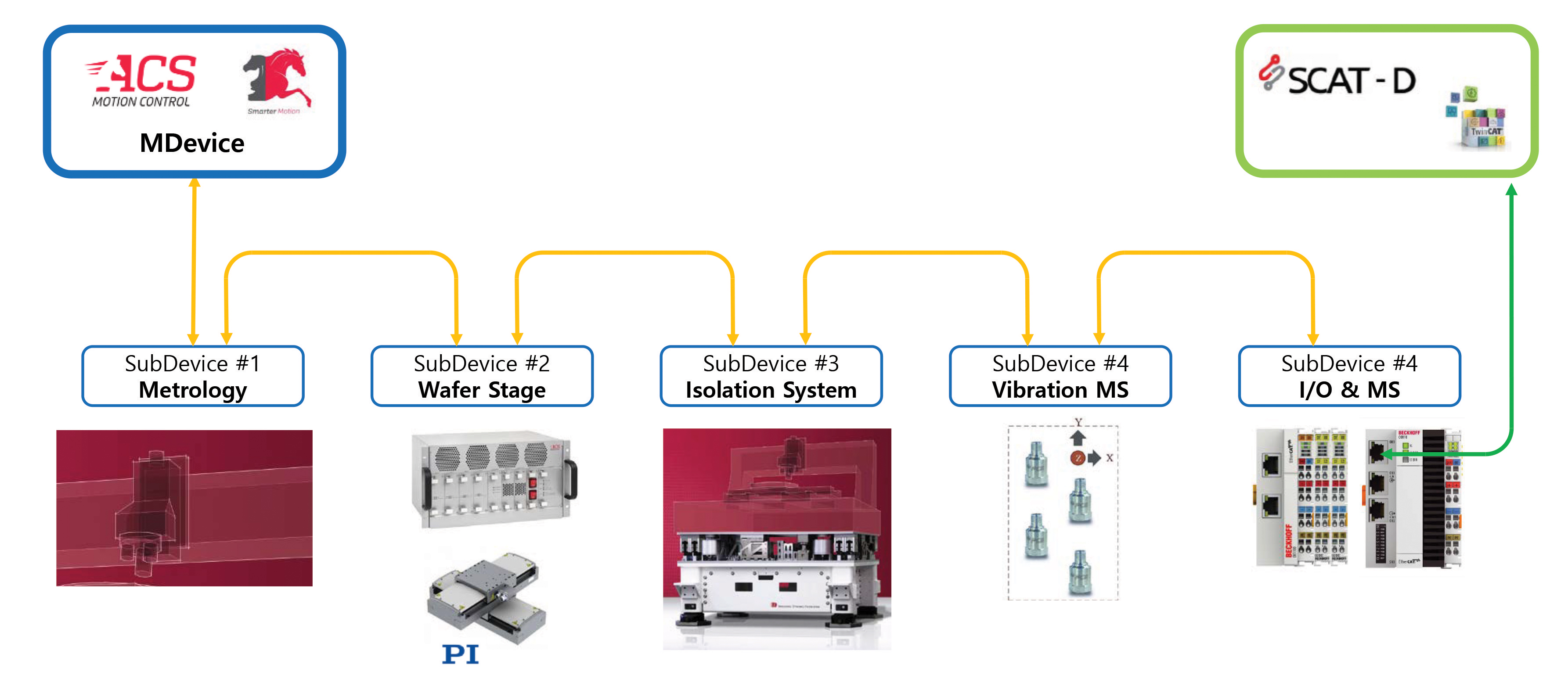
평가설비 구성도. @ PRESTO SOLUTION
전체 시스템
첫 번째 메트로로지는 유저의 오브젝트가 되고, 두 번째는 모션 컨트롤러, 세 번째 단에는 Isolator, 제일 끝단에는 플로우 바이브레이션으로 시스템이 구성된다. 이 복합적인 부분들이 양산했을 때 퀄리티와 UPF를 향상시킬 수 있는 부분이고, 가장 중요한 건 이 모든 게 1년 정도 장비가 잘 운영되다가 갑자기 에러가 발생했을 경우 어떻게 디버깅할 것인지가 관건이다. 따라서 환경에 대해 포커스를 해야 한다. 환경이라고 하면 진동, 온습도 등이다. 진동을 발생시키는 주요인은 모션이다. 모션을 기준으로 진동 데이터를 수집하고 좀 더 진화하면 딥러닝으로 가능할 것으로 생각된다.
데이터를 어떻게 잘 수집을 할까 하는 것이 초점이다. MainDevice는 ACS 모션 컨트롤러를 사용했고, SubDevice는 SCAT-D라는 소프트웨어와 하드웨어를 이용해서 데이터를 1헤르츠주기로 수집을 한다.
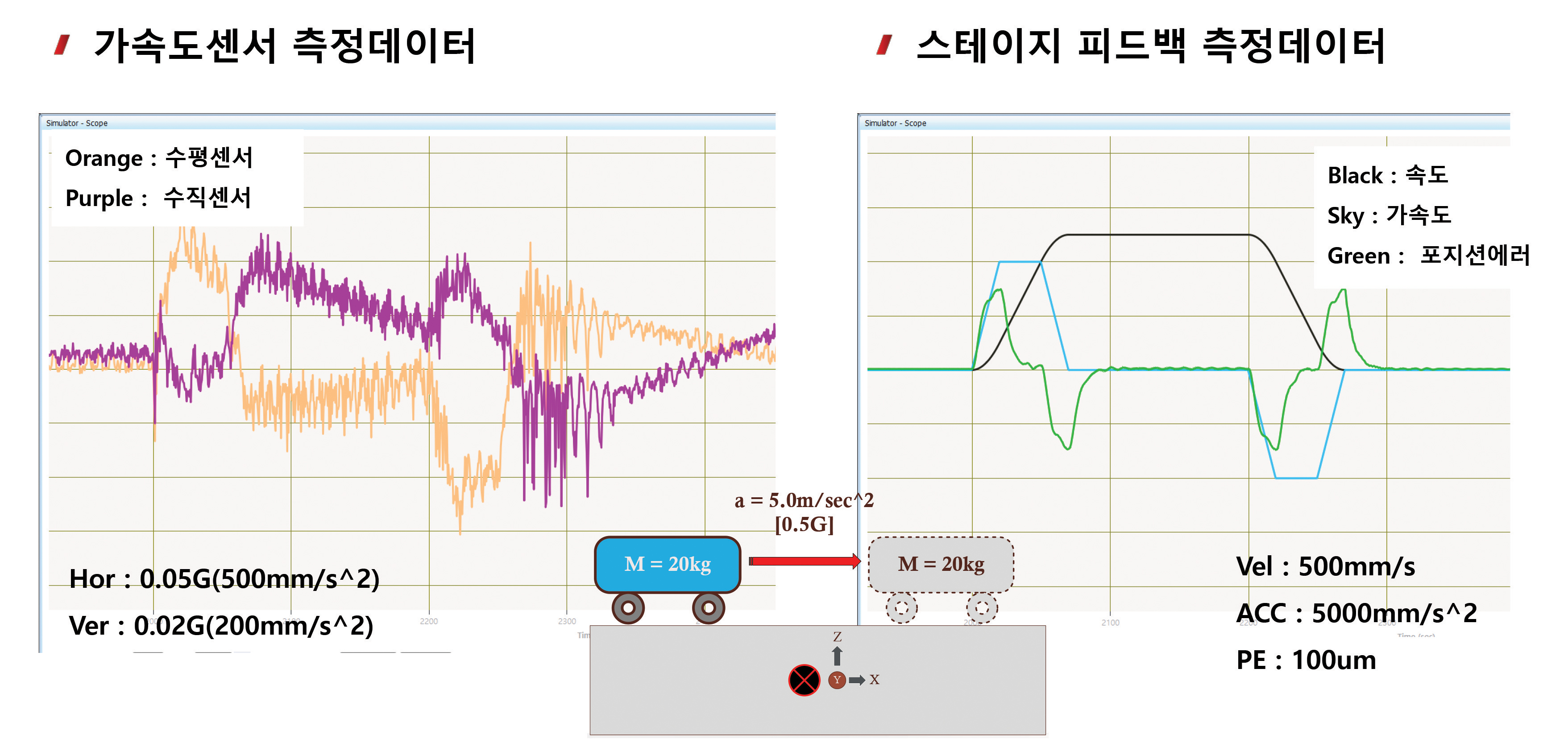
평가결과-개별
평가결과-개별. @ PRESTO SOLUTION
<그림> 왼쪽 그래프는 초기 스테이지를 구동했을 때 생기는 진동을 가속도 센서로 측정한 것이고, 오른쪽 그래프는 모션 프로파일이다. 이 두 가지를 따로따로 보면 분석하는 데 어려움이 있다. 두 개의 데이터를 오버랩시키면 최대 가속할 때 생기는 진동을 명확하게 알 수 있고, 등속구간에 생기는 진동, 스테이지로 모이는 위치 값들, 가속도 센서에서 보이는 진동센서 값들을 오버랩해서 볼 수 있기 때문에, 여기에 필요한 내용을 첨부하면 분석하는 데 훨씬 더 도움이 된다.
모션 프로파일과 가속도 센서 진동을 비교해보면 훨씬 더 보기가 쉽다. 레퍼런스를 가지고 구동을 하면 좀 더 효과적으로 접근할 수 있다는 점이 중요한 포인트다.
하드웨어는 EtherCAT ACS EC라는 MainDevice를 사용했고, 아콘티스(acontis) MainDevice를 개발하는 피처를 제공하기 때문에, 기성품과 EtherCAT을 개발할 수 있는 환경을 제공한다. SubDevice는 아날로그 입출력, 디지털 입출력을 사용했다. 센서는 PCB사의 가속센서와 IDE World 사의 속도 센서를 사용했다.
SCAT-D는 셋업하는 컨피규레이션으로, EtherCAT 안에서 특정 어드레스를 매핑해오면 매핑된 데이터를 계속 로깅하게 되어 있다. 로깅한 데이터를 가지고 실시간 뷰어를 하고, 데이터를 상위PC로 네트워크로 전송할 수도 있다.
결론적으로는 환경에서 발생하는 모든 데이터들을 EtherCAT 통신으로 통합해서 데이터를 보는 것을 연구하고 있다. 제일 마지막 시뮬레이터단에 AI를 도입해서 AI를 넣을 수 있도록 검토하고 있다.
5. EtherCAT 고속통신에 의한 High end motion 미래 가능성 – Movensys 김기훈 대표
Movensys 김기훈 대표가 EtherCAT 고속통신에 의한 High end motion 미래 가능성을 주제로 발표하고 있다. @ EtherCAT Technology Group, Office Korea
Movensys는 1996년 MIT에서 차세대 로봇 컨트롤러 개발 프로젝트로 출범해, 1998년 소프트서보 시스템즈를 MA주 보스턴에 설립하고, 일본 법인 소프트서보 시스템즈 설립했다. 2008년에 아시아 최초로 EtherCAT MainDevice를 소프트웨어만으로 개발 완료했다. 이후에 계속해서 비즈니스를 이어오고 있으며, 2014년 한국법인 소프트 서보 코리아를 설립했다. 2021년 회사 명을 소프트모션앤로보틱스에서 Movensys로 변경했다, 한국에 본사를 두고 있고, 일본에서 핵심연구 개발을 수행하고 있다. 미국 Skylla Technologies 사를 인수해, AMR사업을 주력으로 하고 있다.
‘소프트웨어로 모든 걸 다 하자’는 모토로 30년 가까이 사업을 이어오고 있다. 특화된 하드웨어에 의존하지 않고 스탠다드화된, 누구나 언제나 어디서나 취득할 수 있는, PC 베이스에서 소프트웨어만으로 할 수 있는 모션 제어 기술이 Movensys의 비전이다.
Movensys는 자사가 가장 잘하는 분야는 반도체 분야라고 설명했다. 반도체 전공정, 후공정 대부분의 설비에 Movensys 솔루션을 채택해 사용해오고 있다. 현재까지 한국에서는 3만 카피 이상 실적을 내고 있다. 현장에서 소프트웨어(EtherCAT)만으로, 3만개의 장비가 문제없이 돌고 있다.
FPD 사례도 있는데, FPD 특성상 PC가 들어갈 수 있는 포션이 적고, 그 외 산업 분야의 실적도 많이 있다.
WMX 성공사례: A사 반도체 후공정 설비
WMX는 Movensys의 Software Control 브랜드로, 소프트웨어 기반 모션제어 플랫폼이다. 독자개발한 EtherCAT MainDevice가 탑재되어 있다.
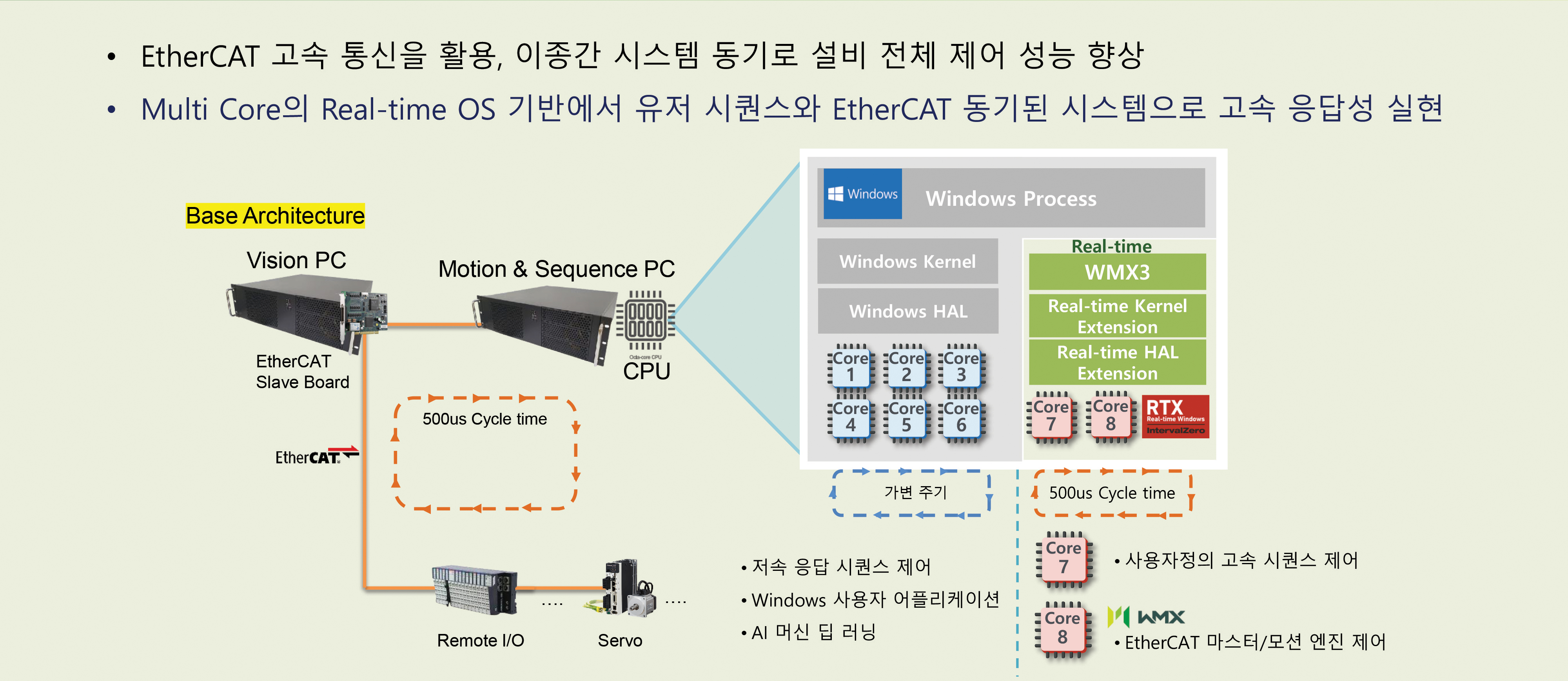
최근 글라스 패키징이 부상하고 있다. 최근 WMX로 플랫폼을 해서 사용한 사례가 소개됐다. 기본적으로 비전 PC와 모션 시퀀스를 위한 PC 2개로 사용을 하는데 이종간 시스템을 싱크해야 하는 과제가 있었고, EtherCAT 사이클 타임에 모든 시퀀스, 사용자가 원하는 모든 이벤트를 동기화하는 것이 가장 큰 숙제였다. 실제 PC에 CPU 코어를 리얼타임 OS 용도로 할당해 사용하고 있다. WMX라는 모션 엔진도 코어 하나에 할당돼서 사용이 되고 있고, EtherCAT 통신주기와 정확하게 일치해서 동작을 한다. 거기에 하나의 코어를 사용자에게 할당을 한다. 사용자는 여기에서 무엇이든 할 수가 있다. 즉, 오픈 아키텍처다. 이렇게 되면 고객사는 자사의 기술력을 고스란히 EtherCAT에 녹여넣을 수 있다. 더 이상 하드웨어가 기술력이 아니다. 이제는 차별 포인트가 소프트웨어다. 자사만의 알고리즘, 자사만의 무형자산을 소프트웨어로 구현을 하고, 묶을 수가 있다.
특히 이 사례에서는 500마이크로세크로 모든 시스템이 완벽하게 동기화돼서 동작을 한다. 이렇게 함으로써, 모든 이벤트든 인아웃은 500마이크로세크라는 EtherCAT에 모두 싱크가 된다. 이렇게 되면 장비의 정밀도, 정주기성이 전체적으로 다 맞는다.
WMX Q사 반도체 후공정 설비 사례. @ Movensys
A사의 사례에는 두 가지 기능이 적용됐다.
첫 번째는 API Buffer라는 기능이다. 정확한 제어 타이밍이 필요한 경우, API Buffer의 API를 사이클타임에 맞춰 호출한다. 최근 반도체 전공정 설비의 챔버의 밸브제어 등에 많이 사용된다.
또 하나는 Compensation(보상) 기능이다. 미세한 기계적인 오차를 모션에서 보상한다. 칩마운트의 경우 XY 좌표로 상당히 빠르게 움직인다. 그런데 기구적인 오차에 의해 미크론 단위로 아주 미세하게 경로가 틀어질 수 있다. 그런 것들도 프로파일에서 빠르게 보정을 해서 쓸 수 있게끔 했다. 이런 기능들을 정밀공정에서 사용하고 있다.
WMX 성공사례: B사 복잡한 제어 시스템, EtherCAT으로 통합. OHT 제어를 하나의 IPC로
EtherCAT으로 통합해서 좋은 성과를 낸 사례다. 과거에는 OHT 컨트롤러를 제어해주는 PC가 사용되고 별도의 모션 모듈을 썼는데, PC와 보드 사이는 TCP/IP로 통신을 한다. 그러나 Movensys는 소프트웨어로 PC 하나에 모든 걸 구현했다. 이를 통해 공간도 절약하고 제어기 통합을 해서 경비를 절감하는 성과를 얻었다. 여기서 가장 좋았던 것은 하드웨어다. 하드웨어에서의 변경점이 필요하고, 커스터마이징하려면 2~3개월이 걸린다. 또 검증하려고 하면 모니터링하기도 힘들다. 펌웨어 단에서 뭔가를 한다는 게 매우 느리고 복잡하다. 소프트웨어에서 빠르게 적용하고 검증해보고 피드백 받고 다시 보정하고 하는데 2~3년이 걸렸던 것들을 단 9개월만에 성공시킨 사례다. PC다 보니까 다양한 요구를 EtherCAT 정주기에 맞춰서 모든 데이터를 로그화시킬 수 있다. 이슈가 발생했을 때 PC 안에서 원인을 타임스탬프로 다 찍어서 볼 수가 있다. 트러블슈팅도 상당히 빨라졌다.
EtherCAT 고속통신에 의한 고성능 모션제어의 미래 가능성
현재 시스템 자체는 PC 컨트롤러, EtherCAT MainDevice, 서보 드라이브로 제어가 완전히 분업화되어 있다. 그리고 MainDevice 쪽에서 드라이브에 많이 개입을 못한다. 서보 드라이브에서는 옆에 있는 축이 어떻게 가고 있는지 모른다. MainDevice만 알고 있다. EtherCAT MainDevice와 서보 내부 MCU와 동기화가 된다면 기존에 아날로그 모션만 할 수 있었던 전유물을 네트워크 모션에서도 다 할 수 있지 않을까?
최근 시장 트렌드는 반도체 선단 공정 모두 나노급이다. 그리고 패키징 쪽도 과거에는 정밀도를 요하지 않았다. 하지만 최근에 어드밴스드 패키지, 패키징 방법에 따라서 글라스 패키징 모두 나노급까지 요구를 하고 있다. 언제까지 여기에 하드웨어 아날로그 모션이 들어갈 것인가? EtherCAT이 빨라지고 IT 기술이 발전하면, 자연스럽게 아날로그 모션도 네트워크 모션에 의해 잠식될 것이다.
6. EtherCAT G와 XPlanar의 콜라보-Beckhoff Automation Korea 유진수 과장

Beckhoff Automation Korea 유진수 과장이 EtherCAT G와 XPlanar의 콜라보를 주제로 발표를 하고 있다. @ EtherCAT Technology Group, Office Korea
이번 발표에서는 EtherCAT G를 사용한 XPlanar에 대한 설명이 진행됐다.
많은 산업군에 EtherCAT이 충분히 적용되고 있다. 1미리세크 미만의 환경에서 100메가비트의 EtherCAT이 충분히 잘 적용이 되고 있는데, 왜 EtherCAT G가 필요한가?
고도의 다이나믹한 기계적인 특성상 사이클당 수백 바이트의 프로세스 데이터를 전송해야 하는 어플리케이션의 경우에는 더 높은 대역폭을 가진 프로토콜이 필요하다. 이러한 데이터를 처리하는 데 있어서 1미리세크 미만의 사이클타임이 요구된다면 더 높은 대역폭을 필요로 하게 된다. 이에 따라 시스템은 더 커지고, 빨라진 사이클타임이 요구되고, 데이터는 더 많아지다 보니까 어떤 측정과 비전, 샘플링, XPlanar 같은 특정 어플리케이션들에게 더 높은 대역폭의 EtherCAT G가 필요로 하게 됐다.
EtherCAT G는 EtherCAT과 크게 다르지 않아야 쓰기가 편할 것이다. 그래서 EtherCAT G도 EtherCAT과 동일하게 프로세싱 인 더 런(Processing in the run)이라는 기능 원리를 그대로 사용하고, ‘On-the-Fly’ 방식으로 입출력과 같은 데이터들을 프레임에 삽입한다. IEEE 802.3 이더넷 표준을 기반으로 하고 있고, EtherCAT MainDevice에서 EtherCAT G를 사용하기 위해 소프트웨어 같은 별도의 업데이트가 필요없다.
그래서 일반적으로 I/O나 드라이브, 센서를 제어하는데 있어서 노드 수에 제한없이 100메가비트의 EtherCAT이 충분히 가능하다고 얘기를 하지만, 실시간 영상처리나 XPlanar 같은 많은 프로세스 데이터를 요구하는 어플리케이션에는 EtherCAT G라는 고 대역폭의 프로토콜을 필요로 한다,
XPlanar는 부유식의 평면형 모터 이송 시스템이다. 이송 시스템이라고 하면 컨베이어 시스템을 얘기하는데, 컨베이어 시스템은 한 번 마운팅이 되면 변경하기가 힘들다. 시스템을 확장하려면 비용도 많이 추가된다. 그리고 개별 구간에서의 공정처리도 불가능하다. 이런 부분을 보완하고자 나온 것이 Beckhoff의 XTS와 같은 리니어 이송 시스템이고, 이와 같은 리니어 이송 시스템을 도입함으로써 개별구간마다 공정처리를 별도로 할 수 있게 됐다. 그런데 XTS 리니어 이송 시스템의 경우에는 무버가 어떤 공정을 처리하기 위해서는 원점으로 복귀해야 하고, 버퍼 같은 특정영역을 지정하기 위해서는 별도의 시스템이 추가돼야 하지만, XPlanar는 그렇지 않다.
XPlanar에는 하부단에 타일이 있는데, 타일을 어떻게 구성하느냐에 따라서 레이아웃을 자유롭게 구성할 수 있고, XPlanar 제품을 사용하면 어떤 프로세스 공정구간의 영역을 버퍼구역과 같이 공용으로 사용할 수 있다는 장점이 있다.
XPlanar를 구성하기 위해서는 5가지 요소가 필요하다.
제어기를 담당할 산업용 PC가 필요하고, 제어와 엔지니어링을 담당하는 소프트웨어 TwinCAT이 필요하다. 타일과 무버, 타일과 PC를 연결하는 EtherCAT G 이렇게 5가지 컴포넌트만으로 간단하게 구성을 할 수 있다.
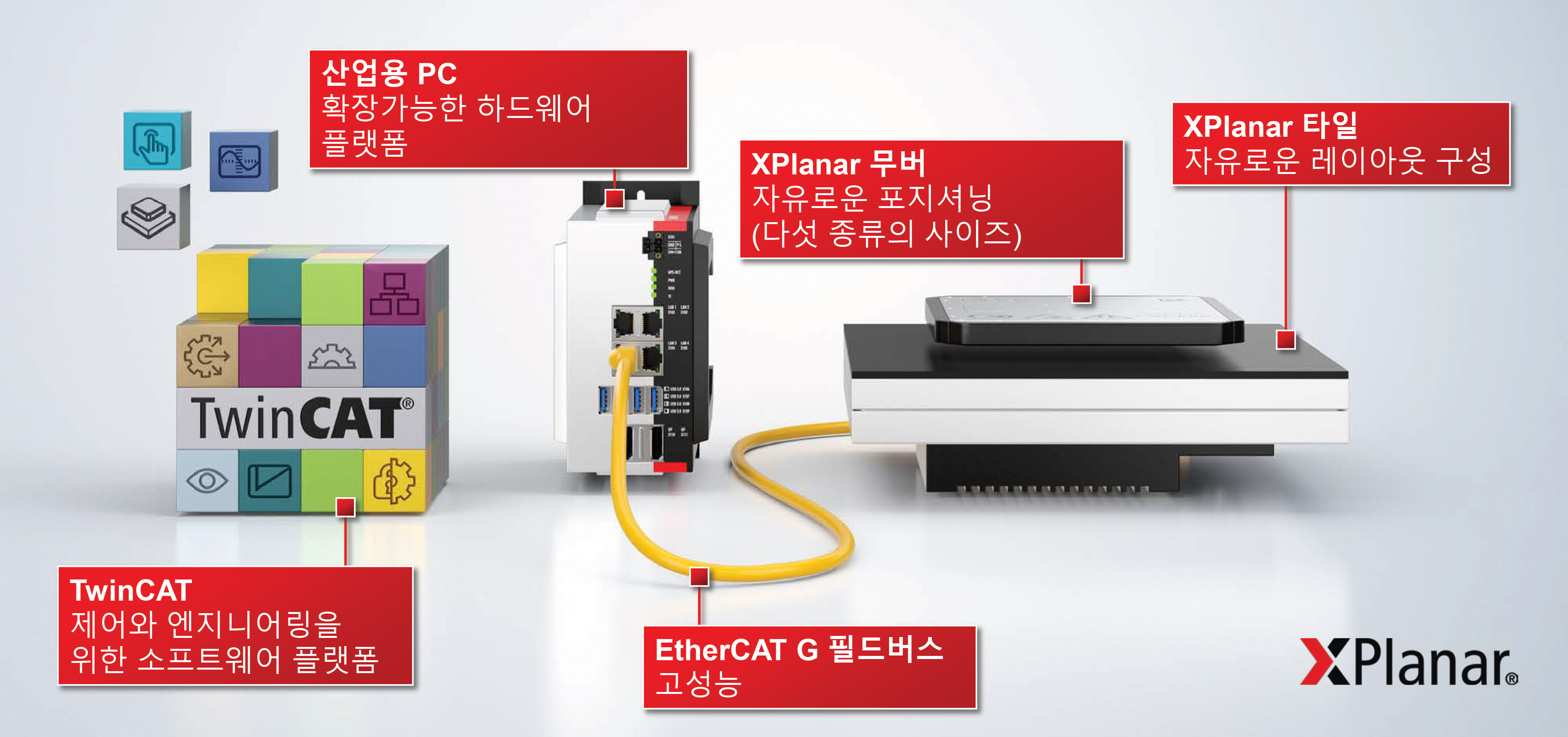
XPlanar 아키텍처. @ Beckhoff
Beckhoff에서는 제품에 대한 신뢰성을 높이기 위해서 실제로 자사제품을 생산공정라인에 적용을 한다. XPlanar 같은 경우도 100개 타일에 33개의 무버가 200개가 넘는 I/O들을 프로그래밍하고 테스트하는 I/O 검수라인에 실제로 적용되어 있다.
국내에 적용한 3가지 사례를 통해서 EtherCAT G를 적용한 XPlanar가 고객에게 어떤 이점을 주었는지 설명했다.
첫 번째 사례는 커피 무인 시스템이다. 휴게소에 가보면 로봇팔이 인력을 대체하고 있는 것을 볼 수 있다. 이런 커피머신의 단점은 대량주문이 들어왔을 때 건 바이 건으로 처리하다보니까 동시에 많은 공정을 처리할 수 없었다. 그리고 별도로 G코드를 통해서 개발이 되기 때문에 개발비용이 비싸다. 이런 부분을 개선하고자 XPlanar를 적용한 사례다.
커피머신은 인력을 대체한다는 의미도 있지만, 저가로 구성해야 한다는 요구가 있는데, 이전에는 여러 개의 프로토콜과 여러 개의 제어기를 써서 제어를 하다 보니까, 파트마다 공급하는 벤더사가 한정적이었다. 그런데 EtherCAT으로 통합을 하면 많은 벤더사들이 각각의 파트들을 여러 개로 공급하고 있다. 고객사는 밴더들의 특장점에 맞춰서 제품을 골라서 사용할 수 있다는 장점이 있었다.
EtherCAT의 또 하나의 장점은 스위치 허브나 게이트웨이와 같은 별도의 하드웨어가 필요없다는 점이다. 커피머신의 특성상 작아야 한다는 요구조건을 전장이나 부수적인 하드웨어를 줄임으로써, 공간효율을 극대화시켰다. 커피머신은 국내뿐 아니라 중국 등 해외로 많이 수출이 되는데, 이런 경우 해외에서 현지 파트를 공급받거나 할 때 가장 많은 밴더사를 보유한 것이 EtherCAT이다.
기존에는 서보나 게이트웨이 하드웨어가 추가가 됐었고, 여러 개의 주문을 처리할 수 없었고, G코드를 통한 별도의 개발비용이 발생했었다. 또, 여러 프로토콜을 사용하다 보니까 스위칭 부분에서 발생되는 늦은 반응속도로 인한 지터 및 택타임 증가라는 문제점이 있었다. 이것을 EtherCAT G를 사용한 XPlanar를 통해 여러 주문을 동시에 처리하고, 폐기와 같은 특정 공정 프로세스를 일반 프로세스와 같이 할 수 있어서 택타임 저하가 없었다. 시뮬레이션이나 시운전을 통해서 실제로 하드웨어 구성 전에 검증을 해볼 수 있었고, 통신을 EtherCAT으로 통일함으로써, 빠른 통신 및 처리속도를 통해서 장비를 개선할 수 있었다.
XPlanar같은 경우, 무버를 제어함에 있어서 무버를 단일로 제어도 가능하지만, 무버를 그룹으로 묶어서 동기제어할 수도 있다. 레시피를 통해서 경로를 따라서 움직이게 하는 경로제어도 가능하다. 이 어플리케이션에는 12개의 경로가 적용이 됐고, 이 12개의 경로를 따라서 스탠바이, 특정 공정들을 처리하게 된다.
공정별로 처리해야 하는 시퀀스에 따라서 경로를 쪼개서 구성을 했고, 레시피는 12개로 제한이 된 게 아니라 더 많이 구성을 할 수 있다.
두 번째 어플리케이션 사례는 카드분류 시스템이다. 기존의 인력으로 카드를 분류하고 포장을 했던 어플리케이션을 XPlanar를 통해서 자동화를 시킨 사례다.
인력으로 하던 일들을 통신 프로토콜을 통해서 자동화시킴으로써 속도가 빨라지고, 사람이 이동하는 경로를 프로세스 구간으로 사용할 수 있어서, 공간에 대한 효율도 극대화가 됐다. 모니터링이나 데이터관리와 같은 부분에 대한 빠른 반응을 받을 수 있었다. 이 어플리케이션에서는 한 사람의 인력을 대비할 수 있게 타일 2개와 무버 4개로 카드를 분류하는 어플리케이션을 구성했다.
과거 50명의 프리랜서들이 카드를 일일이 오더 넘버에 맞춰서, 카드종류에 맞춰서 분류를 했다. 따라서 휴먼에러가 많고 50명의 프리랜서들의 입퇴사, 근퇴문제들을 관리하는데 리소스를 잡아먹었다, 그런데 XPlanar를 적용하고 나서는 24시간 가동하는 안전한 시스템으로 정착이 됐고, 한 번의 설치로 작업자 1명의 대체가 가능했고, 능률이 향상됐고, 작업자를 대신해서 통신 프로토콜이 적용이 됨으로써, 공정을 빠르게 처리할 수 있게 됐다.
지금은 작업자 한 명을 대신한 시스템을 구성했는데, 차기에는 모든 시스템을 통합해서 큰 시스템으로 확장하는 방향을 검토 중에 있다.
다음 적용사례는 의료기기 분야다. 의료기기에서 수작업으로 하는 코딩하는 작업을 XPlanar를 통해서 자동화한 어플리케이션이다. 이오플로우(EOFLOW)라는 웨어러블 펌프를 제조하는 회사의 사레다. 인슐린 펌프 제조공정에서 본딩, 분사, 건조, 체크하는 공정을 XPlanar로 적용했다. 양산제품을 위한 XPlanar의 국내 첫 도입사례다.
100% 수작업으로 진행되던 본딩공정을 자동화하여 생산시간을 30% 단축했고, XPlanar가 부유식이라 마모나 공정상에 발생하는 오염물질에 대한 자유도가 높아졌다. 여기에는 타일 4개와 무버 4개가 적용이 됐고, 각 무버들을 각각의 공정에 맞춰서 로테이션을 돌면서 공정을 처리하게 된다. 이 무버 4개가 본딩, 분사, 건조, 비전체크까지 하는 공정을 비디오로 보여줬다. 앞으로도 EtherCAT G를 활용한 어플리케이션이 더 많아질 것이다.
Ⅲ. 회원사 전시 부스
1. ICOP Technology
ICOP은 전 세계적으로 EtherCAT MainDevice, SubDevice 모터 드라이브 등을 생산하고 있다. EtherCAT 어플리케이션들이 다양한 어플리케이션을 위해서 사용이 되고 있고, 정밀한 로봇 어플리케이션을 위해서도 사용이 되고 있다.
ICOP이 제공하는 오픈소스 개발소프트웨어 ‘86Duino’가 소개됐다. EtherCAT 솔루션을 개발하기 위한 제품이다.
이와 함께 하드웨어 QEC MainDevice가 선보였다. 이 디바이스 안에는 Vortex86ex2가 있다.

ICOP 전시부스.
2. FASTECH
FASTECH에서 새롭게 출시한 액추에이터 결합 모터 드라이버 이지로보(EZI ROBO)가 선보였다. 일체형 액추에이터로 EtherCAT 드라이버로 컨트롤하고 있다. 일체형이라 공간절약이 가능하고, 액추에이터가 일체형이라 비용적인 면에서도 절약이 된다. 올해 2월 정식 출시될 예정이다.
FASTECH 이지로보
3. Beckhoff
XPlanar를 집중 소개했다. XPlanar는 부유식의 평면형 모터 이송 시스템이다. XPlanar에는 하부단에 타일이 있는데, 타일을 어떻게 구성하느냐에 따라서 레이아웃을 자유롭게 구성할 수 있고, XPlanar 제품을 사용하면 어떤 프로세스 공정구간의 영역을 버퍼구역과 같이 공용으로 사용할 수 있다는 장점이 있다.

Beckhoff의 XPlanar
3. Movensys
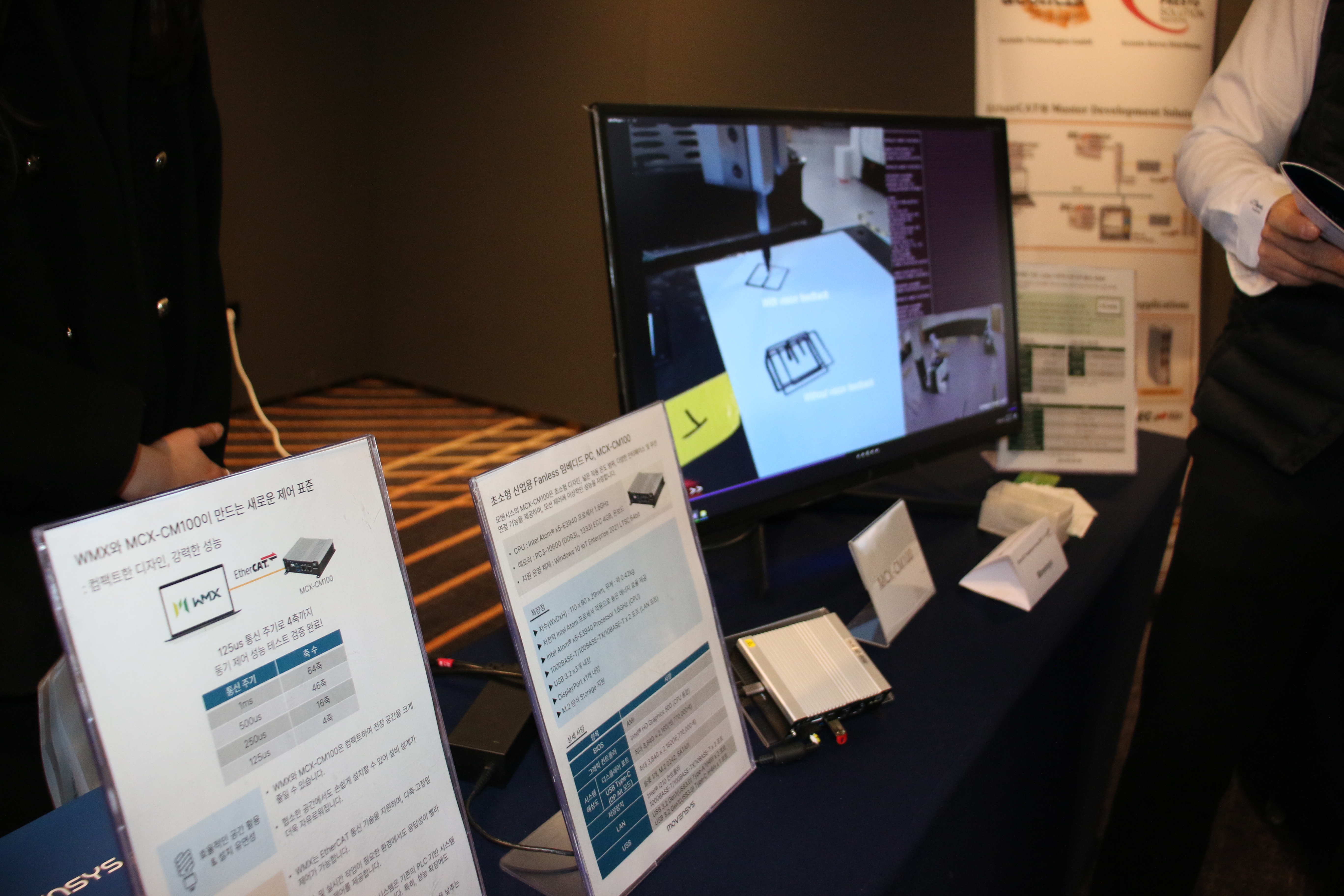
Movensys는 2월에 출시될 초소형 PC MCX-CM100을 선보였다. 이 제품은 110×90×29mm의 초소형 크기로 제작된 팬리스 임베디드 PC로서 저전력 인텔 아톰 프로세서 적용으로 높은 에너지 효율을 제공한다. 다양한 인터페이스 및 무선 연결기능을 제공하며, 모션제어에 이상적인 성능을 자랑한다.
한편 Movensys는 Skylla 자율주행 솔루션을 WMX와 결합하여 AMR 제어 솔루션인 ‘Skylla’ 라인업을 개발 중이며, 향후 단계적으로 제품을 출시할 예정이다. 자율주행 솔루션 Skylla Jetstream은 사실적 맵핑을 통해 정교한 주행이 가능한 고성능, 고정밀 AMR 자율주행 솔루션이다.
전시부스에서는 Movensys의 모션 컨트롤러 WMX, 자율주행 솔루션 Jetstream이 통합된 올인원 MoMa(Mobile Manipulator) 제어 솔루션 Skylla Nova의 시연 동영상을 선보였다.
Movensys 부스
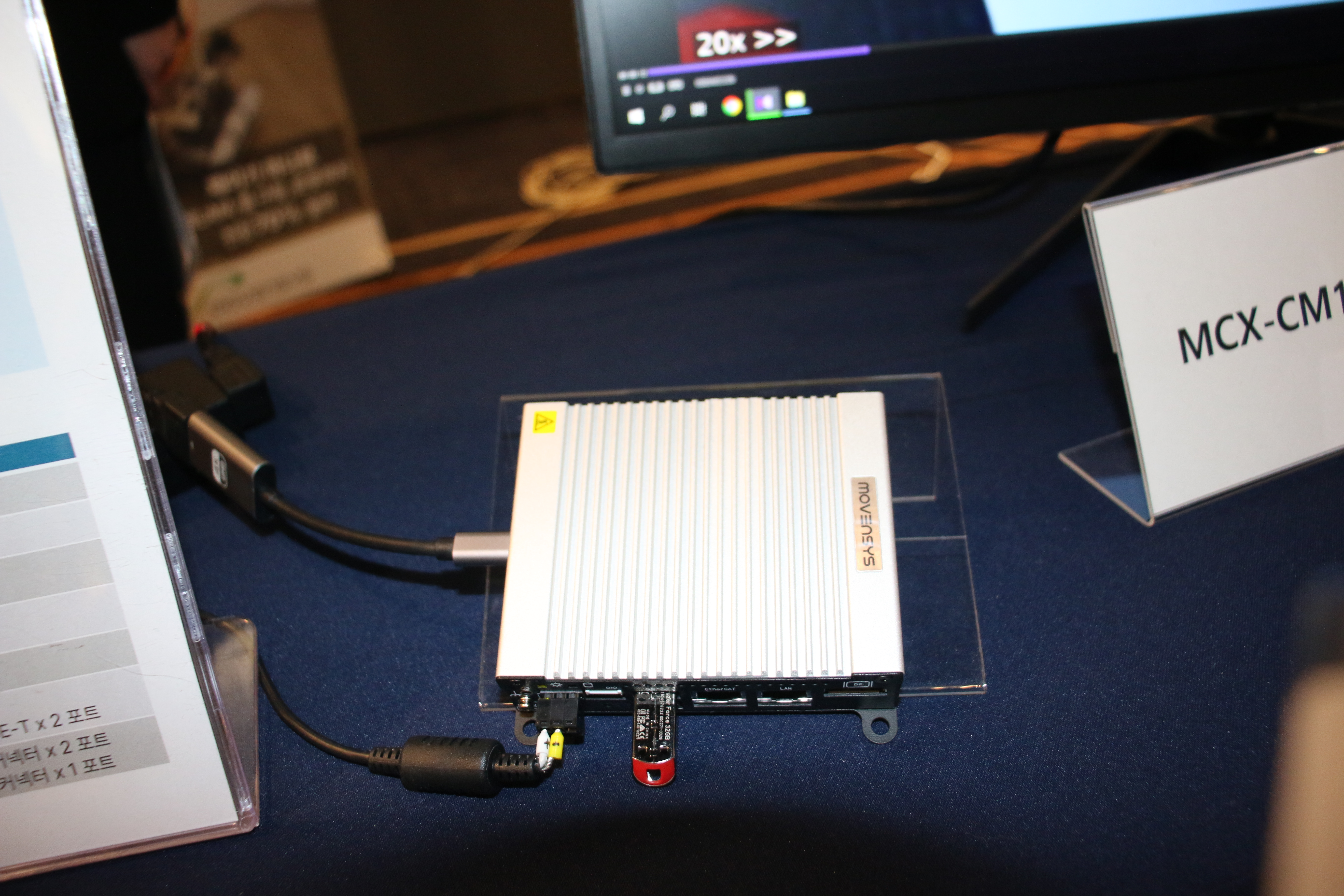
초소형 PC MCX-CM100

OSAT 반도체 후공정을 위한 초소형 모바일 매뉴풀레이터
4. PRESTO SOLUTION
PRESTO SOLUTION에서는 ACS Motion Control 사의 신제품 및 고성능 라인업을 비롯하여, 다양한 Servo/Step/Isolator/IO 등의 솔루션을 소개했다.
또, EtherCAT MainDevice, 개발할 수 있는 소프트웨어 툴, EtherCAT 통신을 분석하고 진단할 수 있는 툴, 가상 시뮬레이터 등 EtherCAT 디바이스를 개발하기 위한 소프트웨어 솔루션을 하나의 판넬로 소개했다.
이 밖에도 버추얼 SubDevice를 위한 SDK와 새롭게 출시된 EtherCAT I/O 모듈 EST 시리즈가 선보였다.
이와 함께 시스템 진동 분석 솔루션 데모가 구동이 됐다. EtherCAT 기반으로 동기화와 데이터수집을 한다.
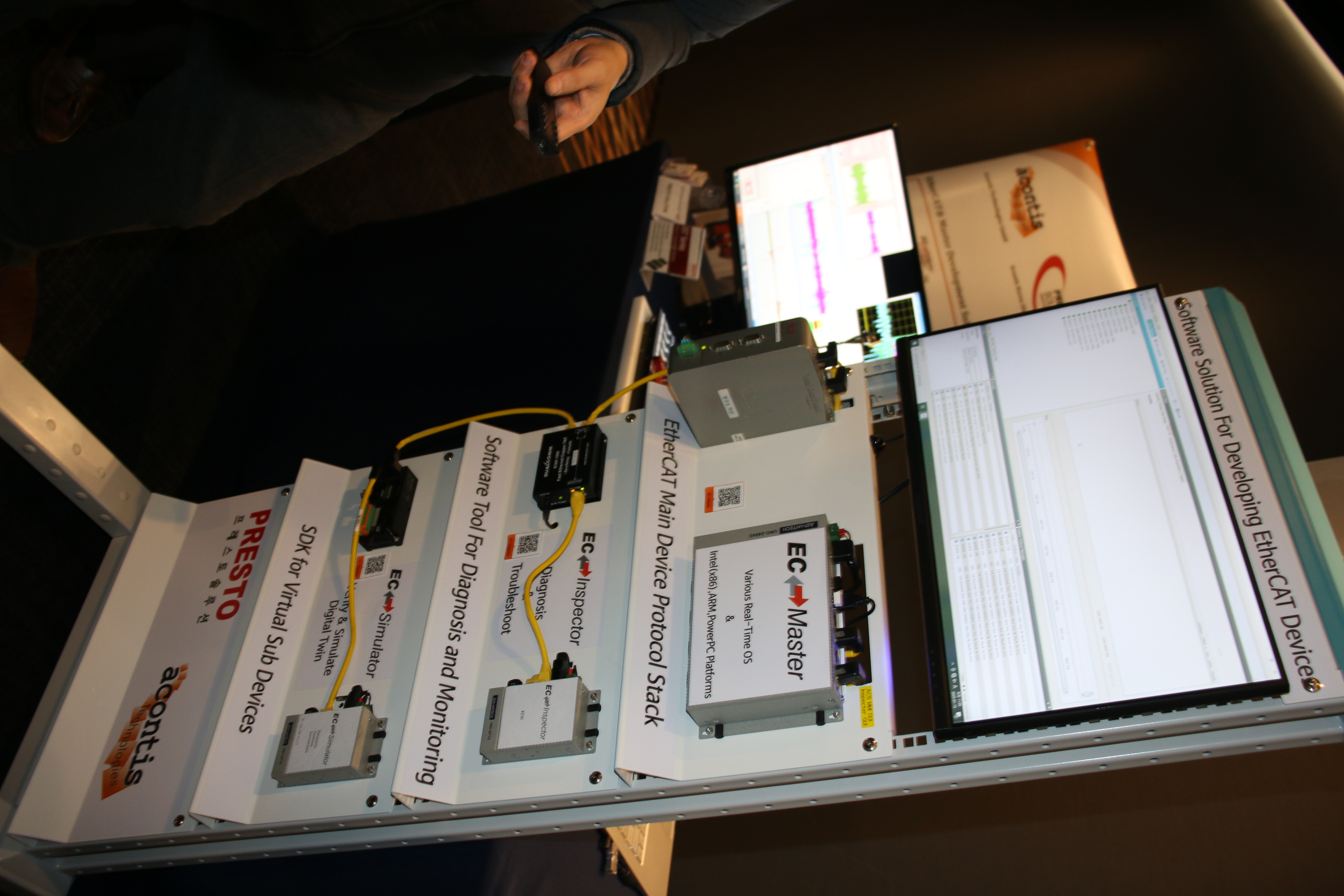
PRESTO SOLUTION의 EtherCAT 디바이스를 개발하기 위한 소프트웨어 솔루션
ACS 시스템 분석 진동분석 솔루션
5. ADLINK Technology

ADLINK Technology 부스
SuperCAT 데모가 구동이 됐다. PC에 소프트웨어 타입과 하드웨어 타입 두 가지가 설치되어 있고, 하드웨어 타입은 하나만 연결을 해놨고 소프트웨어 타입은 4개를 연결해놨다. 브랜드를 가리지 않고 모두 동시에 연결을 한다. 125마이크로세크로 실제 구동이 가능하다. 문제가 생기면 커넥션 퀄리티를 모두 확인할 수 있다. 각각의 상태를 확인할 수 있고, 스테이트 컨트롤 등을 모두 모니터링할 수 있기 때문에, 문제가 생기면 어느 SubDevice에서 문제가 생겼는지 확인이 가능하다. 이런 걸 API가 체크를 한다. 미니타입 PC에서도 가능하다. 실제로 크린토피아 같은 고객은 작은 소형이 제공된다.
SuperCAT은 소프트웨어 EtherCAT MainDevice와 EtherCAT 프로토콜, I/O 컨트롤, 모션 컨트롤을 짧은 시간 안에 통합한다. 125마이크로세크 EtherCAT 컨트롤 사이클, 하나의 PC로 최대 128축 모션제어를 지원한다. 실시간 환경에서 빠르고 안정적인 어플리케이션을 실행하며, MCP2와 어플리케이션을 동시에 실행하여 m/c UPH 미세조정이 가능하다. SuperCAT RTOS에서 사용자 작업 프로그래밍을 실행한다.