







Module Type Package(MTP)는 프로세스 산업 분야에서의 플랜트 모듈화를 위한 현대적 솔루션을 제공한다. MTP는 상위레벨 제어시스템과의 모듈 조정 및 연결을 단순화해주는 인터페이스를 정의한다. Beckhoff의 TwinCAT MTP를 이용하면 MTP 프로젝트 계획 및 자동 코드 생성이 가능하다. 이 솔루션은 보편적인 TwinCAT 엔지니어링 환경에서 모듈을 개발할 수 있도록 통합적이면서 효율적인 방법을 확실하게 제공한다.

Beckhoff의 자동화 소프트웨어는 TwinCAT MTP를 통해 프로세스 산업에서의 플랜트 모듈화를 늘리기 위한 요구사항을 충족할 수 있다. © Beckhoff
프로세스 산업에서 수년 간 어떠한 변화도 없고, 유연함도 부족한 자동화 시스템은 점점 설 자리를 잃어가고 있다. 실제로 생산 과정에서 개성과 유연성이 점점 더 주목을 받고 있다. 가상 물리 모듈화를 적용하면, 적은 노력으로도 프로세스 플랜트를 실현하고 유연하게 조정할 수 있다. 기업들은 이런 방식으로 시장의 변동과 같은 새로운 난제들을 효과적으로 극복할 수 있다. 이를 위해서는 소량의 일괄 처리 물량이라도 수익성이 있으면서 개별화된 생산을 할 수 있어야할 뿐만 아니라, 개발 주기 단축을 통해 제품 개발 및 출시에 소요되는 시간을 가능한 한 단축시킬 필요가 있다.
기계와 생산 모듈을 제조하는 기업들은 대개 프로젝트와 관련된 상위레벨의 생산 시스템과 연결을 원하는 고객의 요구사항을 충족시켜야 한다. 따라서 다양한 프로젝트에서 모듈 유형을 사용하면 통합이나 개발 작업이 늘어나게 된다. 이것은 동시에 플랜트 개발을 위해 시간과 비용이 많이 들어간다는 것을 의미하는데, 이는 유연하지 않은 자동화 시스템의 구축으로 이어진다. 반면에 프로세스 기술 측면에서 미래형 플랜트엔 훨씬 더 유연한 아키텍처가 필요하다.
재사용성을 높이는 모듈화
생산 플랜트를 모듈식으로 설계하고 그에 따라 개별 모듈을 재사용할 수 있어야 적절한 솔루션이라고 할 수 있다. 전체 프로세스는 개별 하위 프로세스로 분류가 되고 해당 모듈별로 매핑이 된다. 모듈마다 별도의 컨트롤러가 있어서 플랜트를 완전하게 모듈화할 수 있다. 상위레벨의 제어 시스템(예를 들어 DCS)에 개별 모듈을 연결함으로써 조정이 가능하고, 이에 따라 전체 프로세스의 매핑도 가능해진다.
결과적으로 해당 개발 작업이 플랜트 엔지니어링에서 모듈 엔지니어링으로 이동되어, 현재의 요구사항에 따라 적은 노력으로도 플랜트를 유연하게 바꿀 수 있다. 이와 같은 방식으로 추가 모듈을 쉽게 덧붙일 수 있거나, 이미 있는 모듈을 재배열 및 제거할 수 있다. 개별 모듈에서의 논리 대부분을 구현했기 때문에 전체적인 재프로그래밍이 필요하지 않다. 상위레벨의 컨트롤러는 해당 부분의 조정에만 관여하며, 이는 Process Orchestration Layer(POL)이라고 부른다.
사실상 프로세스 모듈의 설명을 위한 벤더별 표준에 의해 위의 개념이 구현되는데, VDI/VDE/NAMUR 2658 표준에 정의된 Module Type Package가 이에 해당된다. MTP 파일은 프로세스 모듈을 모듈형 플랜트에 통합하는데 필요한 모든 정보를 담고 있다. 여기에는 서비스, 통신, HMI 탬플릿 형태의 기능이 포함된다. MTP 표준에서 정의된 인터페이스를 통해 플러그 앤 프로듀스(plug-and-produce) 방식이 가능해서, 모듈 재사용에 관련된 간접비가 들지 않는다. 이런 방식으로 모듈은 한번 개발이 된 후에는, 사용된 컨트롤러와 POL과는 관계없이 다른 플랜트에 통합이 가능하다.
Module Type Package
MTP 개념은 자체적인 컨트롤러가 있는 지능형 모듈을 기반으로 하며, 모듈과 상위레벨 POL 간의 인터페이스에 대해 설명을 해준다. MTP 자체는 모듈 엔지니어링에서 추출되어 상위레벨의 제어시스템에 입력되는 아카이브 파일 형태의 모듈에 대한 설명이다. 이 파일은 위 POL이 OPC UA를 통해 해당 모듈과의 통신을 설정하는데 필요한 모든 정보를 담고 있다. 지금까지 다음의 내용들이 모듈에 대한 MTP 설명에서 모델링 되었다.
서비스: 서비스 기반 아키텍처는 반응, 여과, 투여와 같은 모듈의 프로세스상 기능을 요약해서 나타낸다. 다른 모듈의 서비스는 POL에서 조정된다.
서비스 관계: 종속성을 정의해서 개별 서비스들이 서로 방해하는 것을 방지할 수 있다. 예를 들어 현재 투여가 진행되고 있으면 반응 서비스의 가동이 금지된다.
HMI 탬플릿: 모듈의 P&ID(Piping and Instrumentation Diagram)는 MTP에 구조적 설명으로 저장되므로, POL는 균일한 모양과 느낌으로 시스템에 대한 실제 사용자 인터페이스를 자동으로 생성할 수 있다. OPC UA 프로토콜을 통해 이와 같이 생성된 사용자 인터페이스에 프로세스의 값을 통합한다.
TwinCAT 소프트웨어에서의 MTP 통합
TwinCAT MTP를 사용하면 프로세스 플랜트용 MTP 지원 모듈의 엔지니어링이 친숙한 엔지니어링 환경에 직접 통합되며, 모듈의 정의, MTP의 불러오기, 내보내기부터 자동 코드 생성까지 모든 선택사항이 제공된다. 이와 같이 새로운 TwinCAT 기능의 개발 목표는 표준 전문 지식을 최소화하고, 모듈 개발자가 실제적인 제어 논리에 집중할 수 있도록 만드는 것이었다.
MTP 개념은 TwinCAT MTP 런타임 및 TwinCAT MTP 엔지니어링 제품으로 TwinCAT에 통합된다. TwinCAT 엔지니어링 환경에는 TwinCAT MTP 엔지니어링이 자체 프로젝트 유형으로 자신을 통합시키는 프로젝트 관리가 포함된다. 런타임 측면을 보면 TwinCAT MTP에 IEC 61131-3 라이브러리가 포함되는데, 생성된 소스 코드가 이를 사용하여 표준을 준수하는 인터페이스를 구현한다. 이 라이브러리에서 설명된 펑션 블록은 OPC UA 인터페이스를 통해 MTP를 준수하는 펑션 블록의 표현을 보장한다. 따라서 이러한 목적을 위해 사용되는 TwinCAT OPC UA를 통해 표준에 대한 정의에 따라 POL에서의 데이터 액세스가 가능해진다.
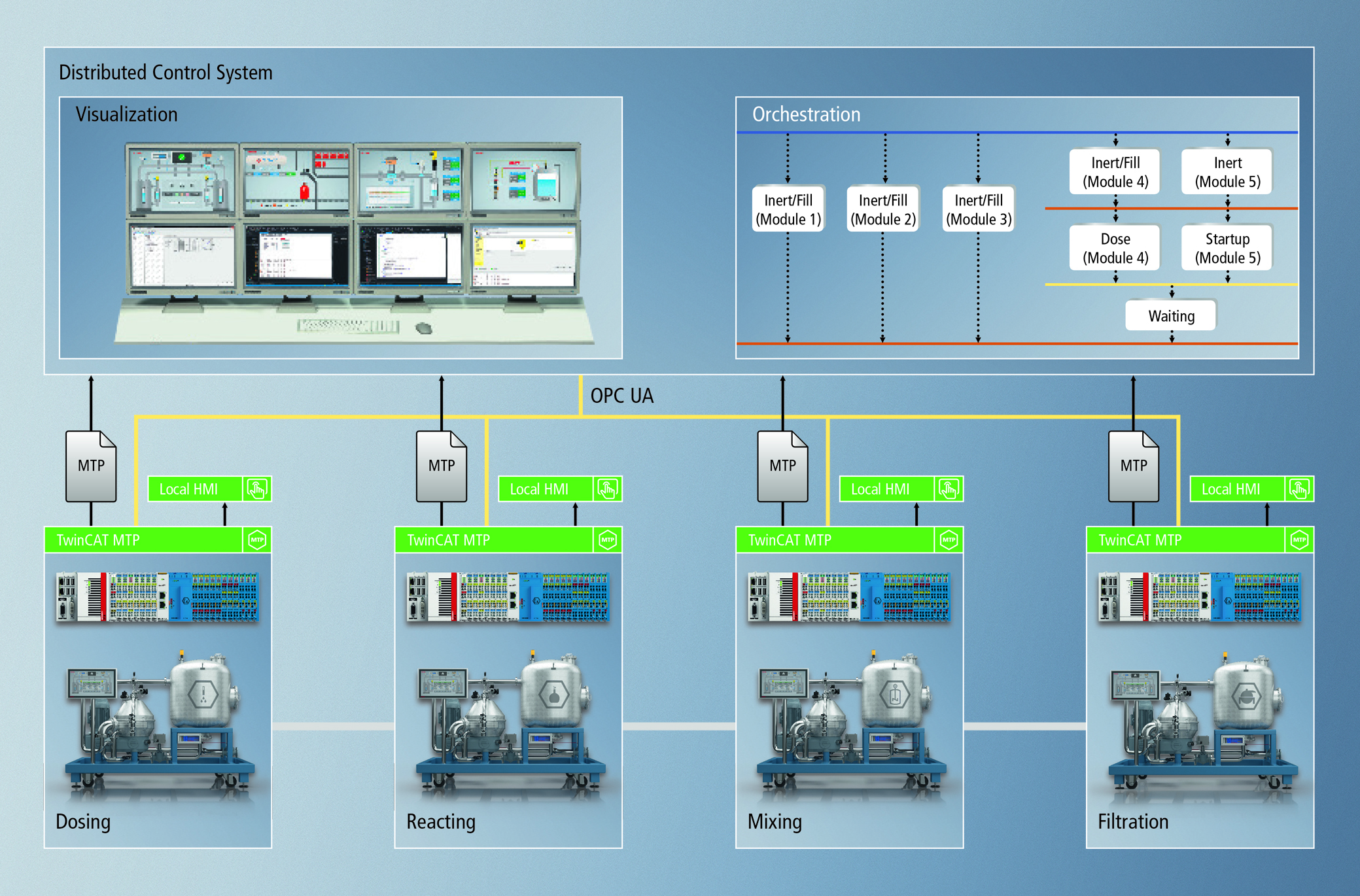
모듈화된 프로세스 엔지니어링 플랜트의 구조. © Beckhoff
TwinCAT MTP를 통한 MTP 워크플로우
모듈 제조업체는 기존의 MTP나 외부 데이터를 불러와서 시작할 수 있다. 이는 예를 들어 모듈의 P&ID를 정의하기 위한 경우와 같이, 이전 단계에서 다른 계획 툴을 사용하는 경우에 특히 유용하다. 프로젝트 관리에서 첫 번째 단계는 서비스, HMI 객체, 추가 정보를 정의해서 모듈을 설계하는 것이다. 그 후, POL이 전체 MTP를 내보내고, 나중에 이를 사용해서 모듈을 제어할 수 있다. 다음 단계에서는 이미 언급된 PLC 탬플릿이 생성된다. 서비스와 서비스 종속성이 자동 구현되기 때문에 무엇보다도 모듈 개발자의 프로그래밍 노력이 최소화된다. 따라서 개발자는 서비스 상태에서 프로세스별 기능만 구현하면 된다.
TwinCAT 엔지니어링의 모듈형 접근 방식 및 TwinCAT MTP의 통합을 통해 모듈의 정의와 컨트롤러 프로그래밍 간 원활한 전환이 가능하다. 이 점은 코드 생성의 유연성에서 특히 분명한데, 조정 가능한 플러그 인이 이를 보장한다. 이 플러그인을 TwinCAT XCAD 인터페이스에 로드할 수 있고, 순수한 PLC 코드 외에 전체 I/O 환경설정이 자동적으로 생성될 수 있다.
결론
Module Type Package는 현대 프로세스 기술의 요구사항을 충족하며, 모듈 제조업체와 플랜트 제조업체 모두에게 비용 효율이 높은 모듈 및 플랜트 엔지니어링의 가능성을 제공한다. 특히 표준화된 MTP 인터페이스가 이를 보장하므로, 모듈은 더 이상 프로젝트별 통신 요구사항을 충족할 필요가 없다. 대신 상위 레벨의 자동화 시스템이 인터페이스 설명을 불러와서, 시각적 형태를 직접 보여주고 저장된 서비스를 조정할 수 있다.
Beckhoff는 TwinCAT MTP에서 유효한 MTP를 생성하기 위해 통합적이면서, 사용이 용이한 솔루션을 제공한다. TwinCAT의 엔지니어링 환경에서 적은 노력으로 자동 생성된 알맞은 PLC 템플릿을 완성해서 표준을 준수하는 모듈 컨트롤러를 만들어 낼 수 있다.
링크:
www.beckhoff.com/twincat-mtp
세부 워크플로우
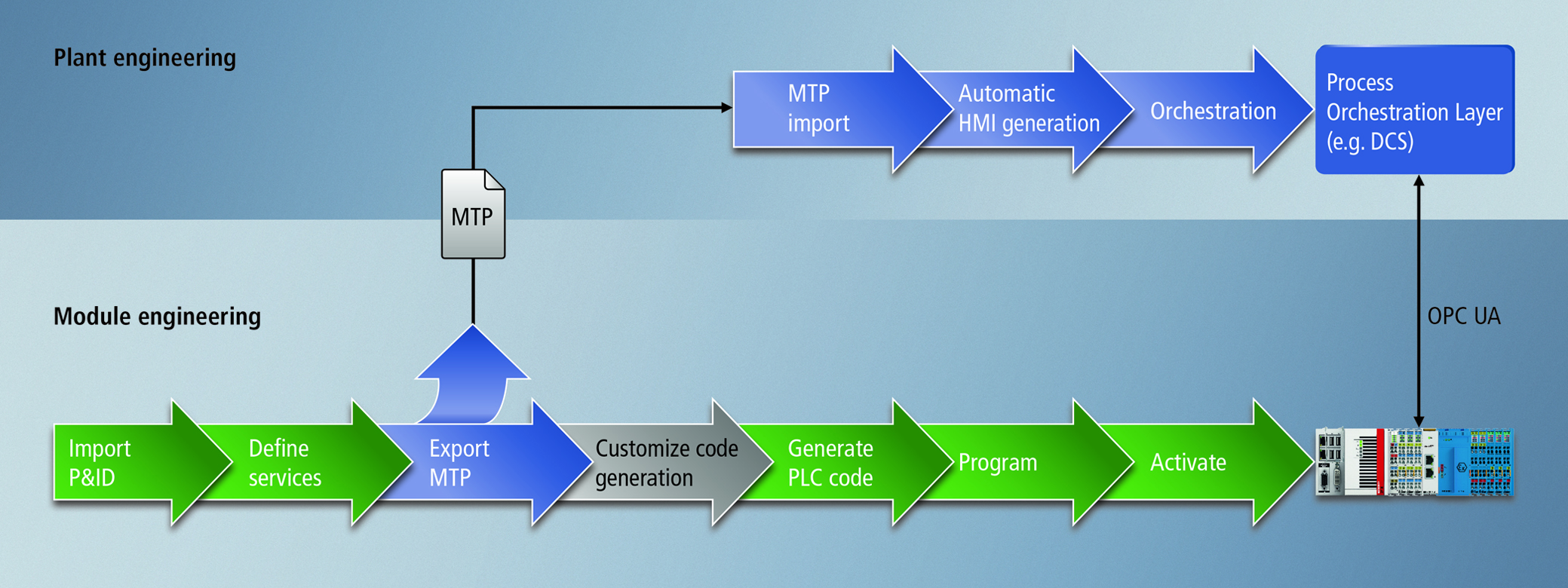
TwinCAT MTP를 통한 모듈 엔지니어링 워크플로우. © Beckhoff
TwinCAT에서 MTP 지원의 특징은 효율적인 워크플로우다.
1. P&ID 불러오기: TwinCAT MTP를 사용해서 MTP를 불러올 수 있고, P&ID 에디터의 인터페이스로 사용할 수 있다. TwinCAT MTP 자동화 인터페이스를 사용해서 독점 데이터 출처와 연결할 수도 있다. 인터페이스는 계획에 따라 MTP 프로젝트에 액세스가 가능하도록 모듈 제조업체에게 API를 제공한다. 따라서 P&ID 에디터가 MTP 내보내기를 제공하지 않아도, P&ID 에디터의 기존 데이터를 사용할 수 있다.
2. 서비스의 정의: 서비스 종속성과 같은 다른 모듈의 양상뿐만 아니라 서비스를 편리하게 정의할 수 있다.
3. MTP 내보내기: MTP를 TwinCAT에서 직접 내보낼 수 있고, 다음에 POL을 사용해서 해당 모듈을 제어할 수 있다.
4. 개별적 코드 생성: TwinCAT XCAD 인터페이스는 필요에 따라 개별적으로 코드를 생성할 수 있고, 추가적으로 생성된 정보를 정해진 방식으로 처리할 수 있다.
5. PLC 코드 생성: TwinCAT MTP은 다음 단계에서 PLC 템플릿을 생성한다. 이는 TwinCAT MTP 라이브러리를 기반으로 하며, 포괄적인 논리가 이에 포함된다. 이 논리를 통해 일체의 표준 요구사항에 대한 사전 환경설정이 구성된다.
6. 프로그래밍: 미리 정의된 서비스의 상태에 대한 프로그래밍을 통해 사전에 환경이 설정된 코드가 최종적으로 마무리된다.
7. 활성화: 설정이 활성화될 때 TwinCAT은 자동적으로 POL이 MTP에서 설명된 대로 OPC UA 통신을 설정할 수 있도록 해준다.
연락처
Beckhoff Automation Co., Ltd.
www.beckhoff.com/kr
info-kr@beckhoff.com