케이제이피기술의 ARMS는 레이저트래커를 이용해 3차원 좌표계에서 실시간으로 움직이는 포인트를 측정하는 소프트웨어로, 특히 로봇 제작 시 정밀도 개선 등에 유용하게 사용된다. 수직·수평다관절 로봇을 비롯해 직교로봇, 공작기계 등 다양한 분야에서 적용 가능하며, 아울러 복잡한 로봇 티칭에서도 활용이 가능하다. 본지에서는 로봇 품질 향상을 고려하는 로봇 메이커들을 위해 케이제이피기술의 ARMS를 소개한다.
케이제이피기술 정남수 이사
제조용 로봇은 10마이크로미터(㎛) 단위의 세상 속에서 움직이는 정밀한 기계 장비로, 많은 로봇 메이커들은 우수한 반복정밀도를 확보하기 위해 하드웨어를 교정하고, 소프트웨어를 업그레이드한다. 현존하는 글로벌 메이커들 또한 유구한 시간동안 시행착오를 거치며 현재 수준의 반복정밀도와 안정성을 확보해왔고, 새롭게 로봇을 제조하는 기업들은 지금도 정밀도 개선을 위해 밤낮으로 고심한다. 그렇다면 로봇 제조에 있어 정밀도를 개선할 수 있는 쉬운 방법은 없을까. 케이제이피기술은 이 질문에 대한 해답으로 역동적인 움직임을 측정할 수 있는 소프트웨어 ‘ARMS(Automated Robot Measurement System)’를 제안한다.
ARMS, 다이내믹 측정을 지원하다
케이제이피기술의 정남수 이사는 고정밀도의 정교한 로봇 제조를 위해서는 제작한 로봇이 객관적으로 정밀한지를 파악해야 한다고 강조했다. 예를 들어, 제작한 로봇의 정밀성이 기준치를 달성하지 못했다면, 어떠한 방향으로, 얼마나 오차가 발생됐는지를 파악해야 개선 방향을 쉽게 설정할 수 있다는 의미이다. 정남수 이사는 이를 “원인을 알면 무작정 조율하는 것보다 쉽게 로봇 정밀도를 개선할 수 있다”라고 표현했다. 이미 로봇을 제조하는 유수 대기업을 비롯해 일본계 로봇 기업에서도 ARMS를 적용하고 있다. 정남수 이사가 2003년도에 처음 이 기술을 개발했을 당시, 일본계 로봇 기업과 기술 협약을 맺고 있던 국내 대기업 S社 담당자들은 자신들이 만든 로봇의 움직임이 그래프로 표현되는 것을 보고 적극적으로 이를 활용해 로봇의 정밀성을 개선했다. 그는 “협약을 맺었던 일본계 로봇 기업 또한 S社에 적용된 ARMS를 보고 이듬해 즉시 도입하고는 수년 간 반복적으로 활용했다”라고 덧붙였다.
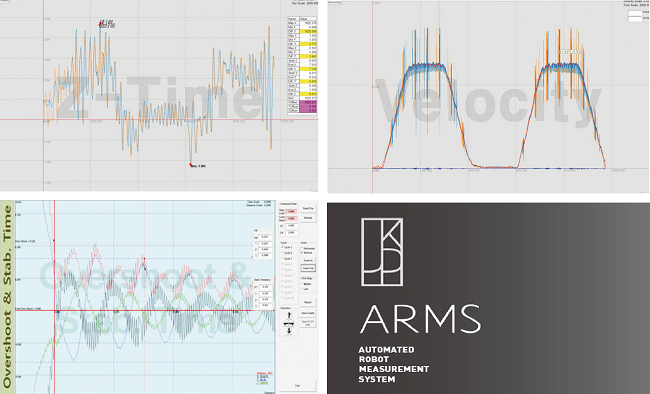
ARMS는 3차원 공간상의 움직임을 그래프화할 수 있다(사진. 케이제이피기술).
케이제이피기술의 ARMS는 3차원 공간 좌표계에서 하나의 포인트를 측정하는 레이저트래커를 이용해 원 포인트가 아닌, 움직임에 대한 포인트를 측정하고 그래프화해 가시적으로 표현해주는 것이 가장 큰 강점이다. 정남수 이사는 “ARMS는 로봇 제조 과정에서 꼭 필요한 측정 기술이 담긴 소프트웨어로, 매우 희소성 높은 기술이다”라며 “로봇은 구조적으로 다수의 관절을 지니고 있고, 각 관절은 다양한 각도로 회전하기 때문에 정밀성을 확보하기가 쉽지 않다. 이를 정밀하게 움직이기 위해서는 제작된 로봇이 어떠한 특성을 가지고 있는지 알아야 개선 방향을 알 수 있다. 어떠한 방향으로, 얼마만큼의 각도가 치우쳤는지 알 수 있다면 로봇 엔지니어들은 손쉽게 로봇을 조율할 수 있다.”라고 설명했다.

ARMS 적용 사례(사진. 케이제이피기술)
극대화된 사용자 편의성
일반적으로 레이저트래커는 카테시안 좌표계의 한 지점을 측정하기 위해 1초에 약 1,000번의 데이터를 측정, 이를 샘플링해 통계를 추출하는 과정을 거친다. ARMS는 X, Y, Z 좌표에 대한 데이터를 실시간으로 추출해 3차원 공간상에서 움직이는 여러 지점을 측정할 수 있는 것이 특징으로, 현재 세계 3대 레이저트래커 메이커인 API와 파로, 라이카 제품에 모두 인터페이스가 가능하다.
ARMS의 또 다른 특징은 사용자 편의성이다. 정남수 이사는 “유저인터페이스가 셋업이 거의 필요 없는 수준으로 매우 직관적이고, 클릭 몇 번만으로 리포트 생성이 가능하다”라며 “특히 측정된 데이터를 리포트 형식으로 제공하는 리포트폼 또한 고객사에서 사용하는 리포트폼에 맞게 지원하고 있다. 일반적으로 소프트웨어 기업들의 경우 자체 리포트폼을 활용하기 때문에 고객사의 입장에서는 측정된 데이터를 엑셀로 가공하거나 이미지를 오려붙이는 등의 후속 작업에 많은 시간을 할애해야 했는데, 이 같은 불편을 해소한 것”이라고 밝혔다.
한편 정남수 이사는 “다이내믹 측정과 동시에 측정 결과를 이용해 로봇을 교정하는 캘리브레이션 기능을 ARMS 하나로 지원할 수 있도록 고민하고 있다”라며 ARMS의 향후 개발 방향에 대해 귀띔했다.
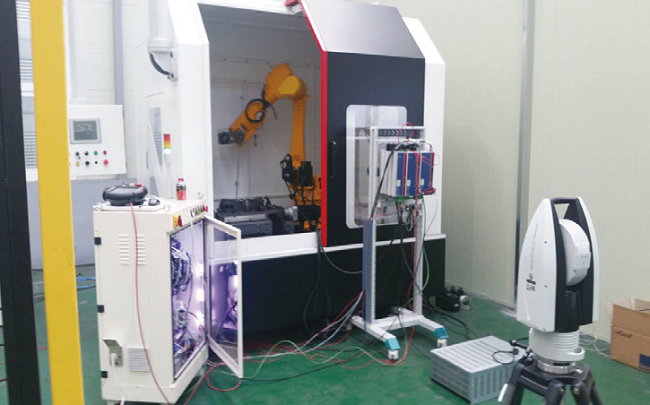
ARMS 적용 사례(사진. 케이제이피기술)
다양한 활용성 기대
ARMS는 로봇 제작 과정 뿐만 아니라 로봇 티칭 작업에 있어서도 그 효과를 발휘한다. 이와 관련해 정남수 이사는 과거 국내 항공산업에 적용된 어플리케이션 사례를 소개했다. 그는 “처음 국내 항공업계 관계자들이 유럽에서 쿠카(KUKA) 로봇을 이용해 항공기를 제조하는 어플리케이션을 견학하고 국내에 도입하고자 했다. 곡면으로 된 항공기 기체에 로봇으로 드릴링하는 작업이었는데, 이를 위해서는 로봇이 기체에 드릴링 툴을 가져가 곡면과 정확히 수직이 되도록 손목 각도를 틀어야 한다는 난제가 있었다.”라며 “오랫동안 개발에 매진한 끝에 2010년도에 완전하게 해석하는데 성공했다. 로봇은 X, Y, Z의 위치좌표와 XR, YR, ZR의 각도좌표로 움직임이 정해진다. 당사는 PC 기반의 로봇 제어로 해당 작업을 수행하면서 ARMS의 파생 기술인 ‘로봇 드릴링 시스템’을 개발하는데 성공했다.”라고 설명했다.
한편 케이제이피기술은 ARMS의 시장잠재성이 매우 높을 것으로 판단하고 있다. 정남수 이사는 “수직·수평다관절 로봇뿐만 아니라 직선 운동이 필요한 직교로봇, 공작기계 등에도 ARMS는 활용성이 높다”라며 “LM가이드가 적용되는 직선 운동 기기의 경우, 조립 작업자의 힘에 따라 순간순간 LM가이드가 미세하게 휜다. 또한 일반적으로 제조 현장에서는 기준점이 되는 LM가이드를 이용해 평행도를 맞추는데, 기준점이 되는 LM가이드 자체에 대한 측정은 고려하지 않는다. 그러나 ARMS는 0.03~0.04㎜ 단위로 비틀리는 LM가이드의 오차를 잡아낼 수 있다.”라고 말했다.

ARMS 적용 사례(사진. 케이제이피기술)
다각적인 사업화 도모
현재 레이저트래커 공급사들은 헥사곤메트롤로지의 3차원측정기 패키지 소프트웨어 SpatialAnalyzer SpatialAnalyzer(이하 SA)와 PolyWorks를 보편적으로 사용하고 있다. SA 또한 반복적인 측정과 분석을 통해 ARMS의 기능을 일부 구현할 수 있지만 편의성 측면에서 매우 떨어진다. 정남수 이사는 “한국로봇산업진흥원에서 ARMS와 외국산 소프트웨어를 비교한 사례가 있다. 진흥원 관계자는 SA를 보유하고 있음에도 불구하고 다이내믹 측정에는 ARMS를 사용하고 있다며 당사 소프트웨어의 편의성에 대해 호평했다.”고 역설했다.
케이제이피기술은 이 같은 ARMS의 강점을 알리기 위해 올 연말부터 로봇 업계에 보다 적극적으로 제품을 알리는 한편, 소프트웨어 판매뿐만 아니라 다이내믹 측정을 필요로 기업들에게 측정 대행 서비스도 함께 제공할 계획이다. 이와 관련해 그는 “소프트웨어 공급과 측정 대행, 그리고 프로그램 개발 등 다각적으로 케이제이피기술의 역량을 확장할 것”이라고 앞으로의 계획을 전했다.
