









TwinCAT MC3는 모듈형 아키텍처의 제반 이점을 제공하는 차세대 모션 제어 솔루션이다. © Beckhoff
TwinCAT MC3는 종합적인 멀티 코어 및 멀티 태스크 지원이 특징인 완전히 새로운 세대의 모션 제어 기술이다. 모듈형 아키텍처를 기반으로 하는 이 제품은 TwinCAT NC2 솔루션으로 이미 구현된 축을 원활하게 통합할 수 있을 뿐 아니라 미래의 모션 요건 또한 간편하고, 직관적으로 통합할 수 있다.
모션 제어는 1996년 TwinCAT이 처음 출시된 이후 자동화 플랫폼의 필수적인 구성요소가 되었다. TwinCAT NC2 솔루션의 성공은 이 솔루션의 시작이 신중하고 실용적인 콘셉트에서 비롯되었기 때문이다. 사용자는 축을 축 객체로 추상화함으로써 하드웨어로부터 독립적으로 축을 시뮬레이션하고 프로그래밍할 수 있다. 이에 더해, 기본적인 단축 이동에서 복잡한 축 결합과 후속 경로 계획, 다양한 어플리케이션별 요건에 대한 맞춤화까지 광범위한 기능을 사용할 수 있다.

MC3 축은 이미 구현된 NC2 축과 결합할 수 있다. © Beckhoff
완전한 시스템 통합 및 첨단 아키텍처
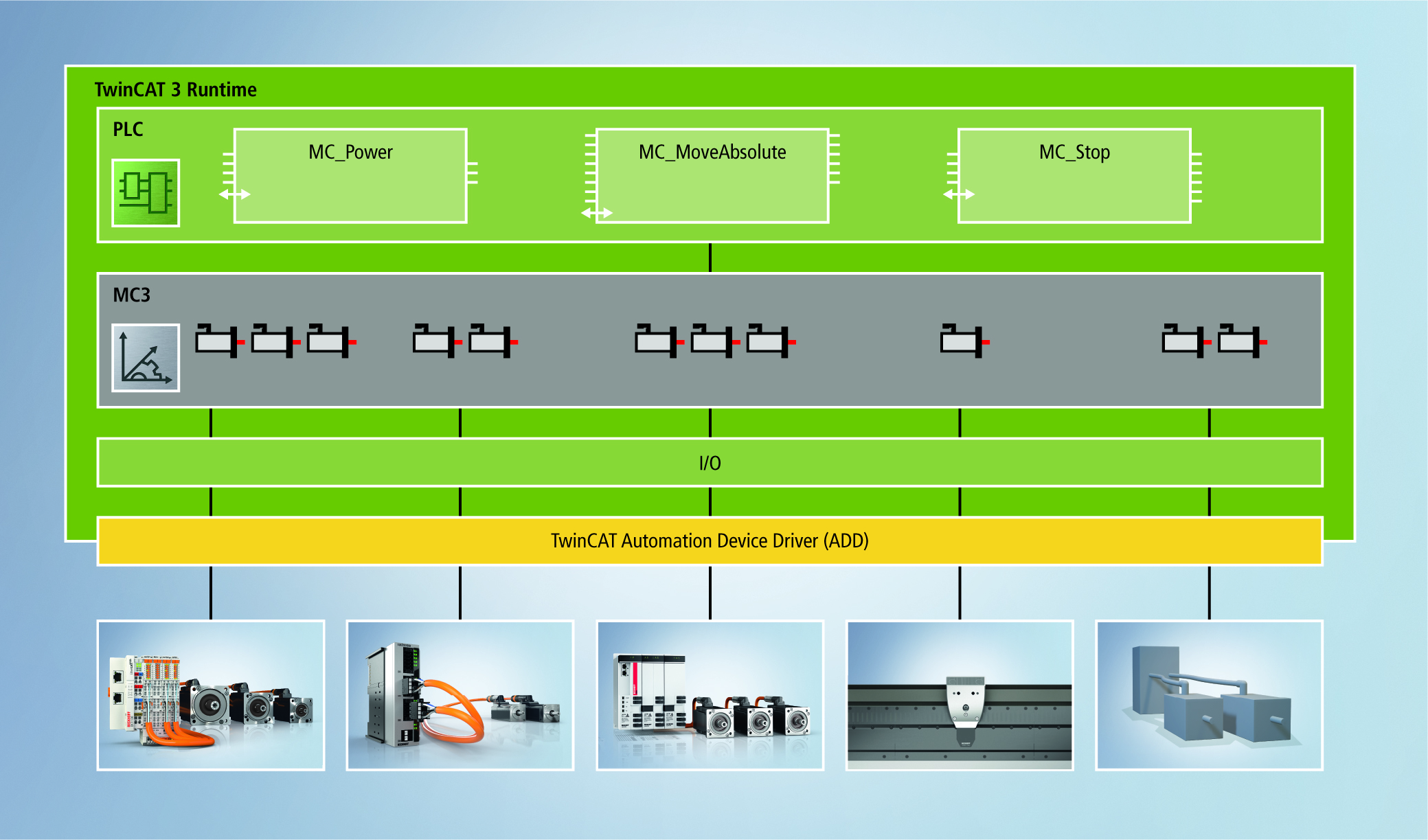
Beckhoff의 이전 모션 제어 솔루션에서 제공하는 핵심 기능도 TwinCAT MC3에 포함되어 있기 때문에 TwinCAT 시스템에 대한 중단 없는 원활한 통합과 용이한 축 추상화가 가능하다. 또한 TwinCAT MC3는 새로운 모듈형 아키텍처를 통해 다수의 추가적인 이점을 제공한다. 특히 종합적인 멀티 코어 및 멀티 태스크 지원을 통해 사용 중인 모든 프로세서 코어에 걸친 동기식 이동이 가능하다는 점과 이전 버전의 축 수 제한이 더 이상 적용되지 않는다는 사실이 주목할 만하다.
TwinCAT MC3를 TwinCAT 시스템에 중단 없이 통합할 수 있다는 것은 모션 제어 솔루션을 하나의 시스템에서 다른 TwinCAT 기능과 함께 운용하는 것이 가능할 뿐만 아니라 이러한 솔루션이 다른 TwinCAT 기능과 통신하는 것도 가능하다는 것을 의미하는 것이다. 주안점은 다음과 같다.
–TwinCAT MC3를 이전 NC2 모션 솔루션과 함께 운용할 수 있으며, MC3 축을 기존 NC2 축과 결합하는 것 또한 가능하다. 이 때문에 NC2를 사용하는 기존 기계 구성품을 수정할 필요 없이 TwinCAT MC3를 사용하여 구현할 수 있다.
–TwinCAT Drive Manager가 Beckhoff 드라이브 솔루션의 시운전을 지원하며, NC2의 경우와 마찬가지로, 표준 파라미터를 사용하여 MC3 구성 및 MC3 축을 자동으로 생성할 수 있다.
–TwinCAT Scope는 이동 및 다이내믹스를 기록한 다음 다양한 툴박스를 사용하여 수동으로 분석하는 데 사용 가능한 강력한 진단 툴이다.

Marlene Arntz, TwinCAT 제품 매니저– Motion Control & Robotics, Beckhoff Automation © Beckhoff
멀티 코어 및 멀티 태스크 지원을 통한 확장성
TwinCAT MC3는 종합적인 멀티 코어 및 멀티 태스크 지원을 통해 제어 컴퓨터 CPU 성능의 활용을 극대화한다. 따라서 잠재적인 축 수와 어플리케이션 복잡도가 선택된 TwinCAT 플랫폼 수준에 따라 조정된다.
–이 맥락에서 멀티 코어가 지원된다는 것은 TwinCAT MC3를 필요에 따라 여러 CPU 코어에 분산할 수 있다는 의미이다. 이동을 사용 중인 모든 CPU 코어에 걸쳐 동기화할 수 있다.
–멀티 태스크가 지원된다는 것은 사이클 시간이 각기 다른 축을 단일 CPU 코어에서 작동하고 각 축의 속도와 작업을 정밀하게 조율할 수 있다는 의미이다. 즉, '가장 빠른' 축이 반드시 모든 축의 클럭 속도를 결정하는 것은 아니므로 CPU 코어 활용을 최적화할 수 있다. 이와 같은 방식으로, 델타 피커가 장착된 컨베이어 벨트의 축을 1 ms의 사이클 시간으로 작동하도록 하여 작업물을 신속하게 픽업하도록 하는 동시에 컨베이어 벨트의 폭 조정이 필요한 축을 동일한 CPU 코어 상에서 4 ms의 사이클 시간으로 작동할 수 있다.
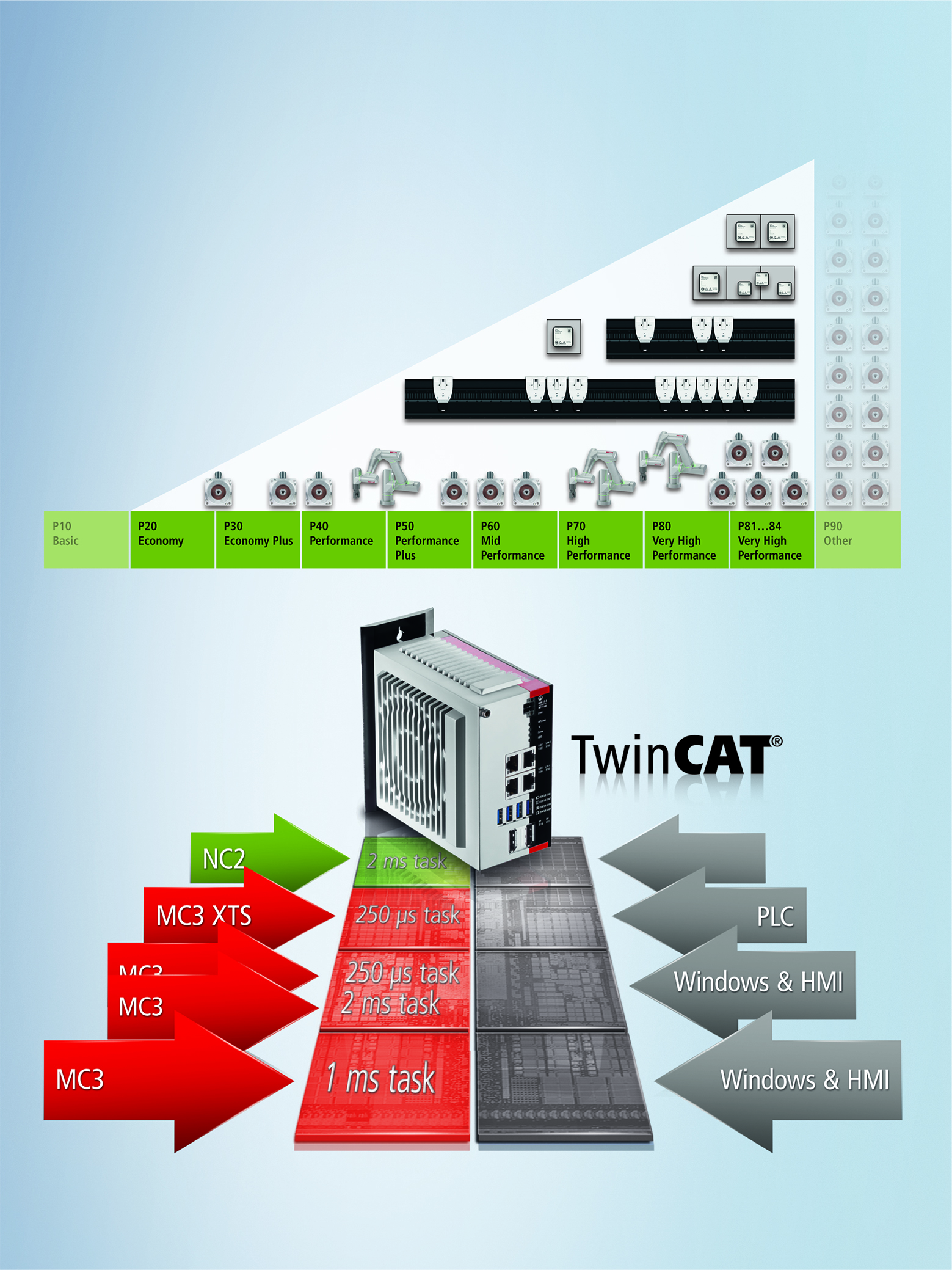
TwinCAT MC3를 사용하면 잠재적인 축 수와 어플리케이션 복잡도를 TwinCAT 플랫폼 수준에 따라 조정할 수 있다. © Beckhoff
하드웨어 독립의 이점
이전 모션 제어 솔루션과 마찬가지로, TwinCAT MC3는 축을 축 객체로 추상화하여 하드웨어를 프로그래밍 공정으로부터 분리한다. 이를 통해 하드웨어 독립을 구현할 수 있는데, 다음과 같은 특징에서 그 이점을 확인할 수 있다.
–축을 시뮬레이션할 수 있으며, 한 프로젝트에서 실제 축과 가상 축을 혼합하여 시뮬레이션하는 것 또한 가능하다. 구성에서 클릭 한 번으로 개별 축과 축 그룹 모두에 대해 실제 축과 가상 축 간에 시뮬레이션 전환을 수행할 수 있다. 따라서 하드웨어에 연결할 필요 없이 축을 프로그래밍하고 실제 기계에서 시운전 기간을 단축할 수 있다.
–TwinCAT은 EtherCAT의 고성능 통신 시스템뿐만 아니라 다른 일반 필드버스 시스템을 모두 지원하는 개방형 제어 플랫폼이다.
–서보 모터, 스텝 모터, DC 모터와 같은 다양한 드라이브 시스템과 XTS 제품 이송 시스템을 축 객체로 동일하게 추상화할 수 있으므로, 균일한 프로그래밍이 가능하다. 프로그래밍은 사용자가 NC2에서 인식 가능한 PLCopen 호환 펑션 블록을 제공하는 TwinCAT Tc3_Mc3 라이브러리를 통해 간편하게 수행할 수 있다.
–TwinCAT MC3의 경우 유압 축 또한 지원하기 때문에 이를 완전하게 통합할 수 있다. 일반적인 프로그래밍은 전동 축에 사용되는 것과 같은 PLCopen 호환 펑션 블록을 사용하여 수행한다. 특수 유체 동력 기능을 위한 추가적인 펑션 블록이 포함된 라이브러리도 존재한다.
TwinCAT MC3는 축 객체로의 추상화 기능 덕분에 사용 중인 모션 하드웨어로부터의 독립성도 구현할 수 있다. © Beckhoff
모듈형 아키텍처와 높은 기능성
TwinCATMC3 는 미래에도 사용 가능한 모듈형 아키텍처를 기반으로 한다. 이러한 새로운 아키텍처의 대표적인 특징이 멀티 코어 및 멀티 태스크 지원이다. 새 아키텍처는 미래에 새 기능을 구현할 때도 용이한데, 고객별 요구 사항에 맞게 프로파일 생성기, 드라이버, 필터를 맞춤화하는 경우가 대표적인 예이다. TwinCAT MC3는 NC2의 이미 친숙하고 입증된 기능도 포함하고 있다. 차세대 모션 제어 솔루션의 첫 번째 출시품은 point-to-point 이동 및 결합이 출발점이며, 단순 선형 축 결합부터 비선형 모션 결합까지 폭넓은 범위를 망라할 것이다.
링크: